You might also like
- Motion Sensing and Control ProductsDocument64 pagesMotion Sensing and Control Productsekitani6817No ratings yet
- EncoderDocument44 pagesEncoderdaiduongxanh14113No ratings yet
- Arduino Resource Guide PDFDocument110 pagesArduino Resource Guide PDFh_romeu_rs100% (2)
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- Microcontroller To Sensor Interfacing TechniquesDocument13 pagesMicrocontroller To Sensor Interfacing TechniquesSantosh Martha100% (1)
- PIC CookbookDocument85 pagesPIC CookbookSandeep100% (3)
- UnitrodeLinearIntegratedCircuitsDataBook Text PDFDocument824 pagesUnitrodeLinearIntegratedCircuitsDataBook Text PDFa_babaNo ratings yet
- 1 B 960 ADocument3 pages1 B 960 AECEOCETNo ratings yet
- Unit-5 PIC18 Architecture PDFDocument26 pagesUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- 0521895944-Carte RobotiDocument361 pages0521895944-Carte RobotiGeanina BoboceaNo ratings yet
- Robotics Course StructureDocument4 pagesRobotics Course StructurerohitNo ratings yet
- Laboratory ExperimentsDocument48 pagesLaboratory ExperimentsOnofre Daniel100% (1)
- Servo2006 05 UltrasonidoDocument92 pagesServo2006 05 UltrasonidoKarina Cristina ParenteNo ratings yet
- Basic Electronics LabDocument60 pagesBasic Electronics Labrahulsingle67% (3)
- Mechanics and Control in RoboticsDocument570 pagesMechanics and Control in RoboticsMohammad SafaeipourNo ratings yet
- Robotics BookDocument137 pagesRobotics BookdineshkumarbaskaranNo ratings yet
- MW TUBES FUNDAMENTALSDocument58 pagesMW TUBES FUNDAMENTALSzohaibNo ratings yet
- PLC BASICS: A GUIDE TO PROGRAMMABLE LOGIC CONTROLLERSDocument75 pagesPLC BASICS: A GUIDE TO PROGRAMMABLE LOGIC CONTROLLERSJAY BHAVSAR50% (2)
- PIC Microcontrollers For Beginners PIC16F84ADocument186 pagesPIC Microcontrollers For Beginners PIC16F84Aga6ba5No ratings yet
- Semiconductor Device Fundamentals SolutionsDocument300 pagesSemiconductor Device Fundamentals SolutionsSeth Hays50% (2)
- Fundamentals of RoboticsDocument19 pagesFundamentals of RoboticsdharshanirymondNo ratings yet
- Schematic Ktc-Cbu 24 VCMDocument4 pagesSchematic Ktc-Cbu 24 VCMMarco Kersul100% (1)
- Electronics Lab Manual 1Document27 pagesElectronics Lab Manual 1divyajdiv100% (1)
- Power ElectronicsDocument450 pagesPower ElectronicsBibin K Padur0% (1)
- 1977 National Pressure Transducer HandbookDocument146 pages1977 National Pressure Transducer Handbookedavi1No ratings yet
- Basic Electronics Basic RoboticsDocument136 pagesBasic Electronics Basic Roboticsrakesh_rodyNo ratings yet
- Klu 8051Document165 pagesKlu 8051manvithbNo ratings yet
- Perspective of Modern PhysicsDocument316 pagesPerspective of Modern PhysicsPoornima JainNo ratings yet
- NTUST Power Electronics Course OverviewDocument451 pagesNTUST Power Electronics Course OverviewSteven SengNo ratings yet
- Nilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsDocument15 pagesNilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsGohil HardikNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- H-Bridge PPDocument16 pagesH-Bridge PPMohammed HediaNo ratings yet
- Servo MotorDocument21 pagesServo MotorsafvanshaikhNo ratings yet
- Servo MotorDocument21 pagesServo MotoribrahimNo ratings yet
- Class DutyDocument58 pagesClass DutyHarsha AnantwarNo ratings yet
- Motor Control: (Relay, PWM, DC, and Stepper Motors)Document36 pagesMotor Control: (Relay, PWM, DC, and Stepper Motors)Ammar EhabNo ratings yet
- MCR2 EncoderDocument19 pagesMCR2 EncoderCarlos SolanoNo ratings yet
- Building Automated Robots: Sensors, Motors, and ControlDocument34 pagesBuilding Automated Robots: Sensors, Motors, and ControlviswakshaNo ratings yet
- Servo MotorDocument21 pagesServo Motorthreephasefault100% (1)
- Everything You Need to Know About Motors and DriversDocument15 pagesEverything You Need to Know About Motors and Driverskbp qawaNo ratings yet
- Servomotor PptsDocument26 pagesServomotor Pptsjasdeep_kour236066No ratings yet
- Essential Robot ActuatorsDocument19 pagesEssential Robot ActuatorsMeryL AngNo ratings yet
- Basics of Servo System and SimulationDocument45 pagesBasics of Servo System and Simulationgk_gbu100% (1)
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Introduction to Motor Control FundamentalsDocument31 pagesIntroduction to Motor Control FundamentalsNipun HarshaNo ratings yet
- 06 Auto TransformerDocument19 pages06 Auto TransformerMuhammad NaguibNo ratings yet
- Lecture 12 - Servo Motor ControlDocument16 pagesLecture 12 - Servo Motor ControlSaad Murad GorayaNo ratings yet
- Interfacing Stepper Motor With 8051 MicrocontrollerDocument21 pagesInterfacing Stepper Motor With 8051 MicrocontrollerSam AndersonNo ratings yet
- Ch8 - DC DrivesDocument55 pagesCh8 - DC DrivesAli HasanyNo ratings yet
- Switched Reluctance MotorDocument75 pagesSwitched Reluctance Motor15BEE1120 ISHAV SHARDANo ratings yet
- of PWM DC MotorDocument21 pagesof PWM DC Motorabhay_131250% (4)
- Lecture 16Document15 pagesLecture 16Azam KhanNo ratings yet
- Eeeviews: Unit Iv Synchronous Motor DrivesDocument26 pagesEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamNo ratings yet
- Everything about Stepper MotorsDocument25 pagesEverything about Stepper MotorsزهديابوانسNo ratings yet
- Stepper MotorDocument27 pagesStepper MotorAumarNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument23 pagesSpeed Control of DC Motor Using Pulse Width Modulationarnav060419891190No ratings yet
- Simulation of Electro-Hydraulic Servo Actuator PDFDocument73 pagesSimulation of Electro-Hydraulic Servo Actuator PDFstrafforNo ratings yet
- c02 nx8.5 EvalDocument56 pagesc02 nx8.5 EvalstrafforNo ratings yet
- AutoCAD 3D Course ManualDocument166 pagesAutoCAD 3D Course ManualJed Tedor98% (47)
- Pde3350 GB PDFDocument148 pagesPde3350 GB PDFstrafforNo ratings yet
- Chapter 6. Behavior of MaterialsDocument11 pagesChapter 6. Behavior of MaterialsstrafforNo ratings yet
- ActuatorsDocument43 pagesActuatorsNavneet SinghNo ratings yet
- Embedded Systems and RoboticsDocument59 pagesEmbedded Systems and RoboticsSohel Tarir100% (3)
- Introduction to Microcontrollers and Embedded SystemsDocument22 pagesIntroduction to Microcontrollers and Embedded SystemsstrafforNo ratings yet
- DDFGGDocument2 pagesDDFGGstrafforNo ratings yet
- The Mechanical Aspects of RoboticsDocument19 pagesThe Mechanical Aspects of RoboticsSuryakant MunjewarNo ratings yet
- DTMFDocument19 pagesDTMFYash SharmaNo ratings yet
- TC Express Version 2 Fs W 2 Tcm1023-5011Document3 pagesTC Express Version 2 Fs W 2 Tcm1023-5011strafforNo ratings yet
- c01 nx8.5 EvalDocument20 pagesc01 nx8.5 EvalSeshi ReddyNo ratings yet
- Unigraphics NX4 ManualDocument700 pagesUnigraphics NX4 Manualajaykrishnaa100% (7)
- Free Siemens NX (Unigraphics) Tutorial - Surface ModelingDocument53 pagesFree Siemens NX (Unigraphics) Tutorial - Surface Modelingitltechnology73% (11)
- Chiang - Chapter 4Document14 pagesChiang - Chapter 4straffor100% (1)
- Physics Study Material on Electrostatics for AIEEEDocument66 pagesPhysics Study Material on Electrostatics for AIEEEChandan18041970100% (1)
- Indian Calendar With HolidaysDocument12 pagesIndian Calendar With HolidayssmiledepakNo ratings yet
- QBxi Model PaperDocument2 pagesQBxi Model PaperstrafforNo ratings yet
- EccentricityDocument4 pagesEccentricitystrafforNo ratings yet
- Iraqi Code for Reinforced Concrete StructuresDocument71 pagesIraqi Code for Reinforced Concrete Structuresmamandawe50% (2)
- List of Linkages2016Document74 pagesList of Linkages2016engrwho0% (1)
- Filter DesignDocument4 pagesFilter Designhassan11783No ratings yet
- VisiLogic Software Manual-LadderDocument158 pagesVisiLogic Software Manual-LadderEduardo Vasquez CastroNo ratings yet
- Chapter-6 IscaDocument1 pageChapter-6 IscakishorejiNo ratings yet
- Fajs FSXDocument8 pagesFajs FSXJunhy Bandeira CassandraNo ratings yet
- Exploratory Boring Spacing & DepthDocument24 pagesExploratory Boring Spacing & Depth18106 Mahmudur RahmanNo ratings yet
- Flash ADCDocument3 pagesFlash ADCKiran SomayajiNo ratings yet
- SteelKote EP ZN HS: High-Build Zinc-Rich Epoxy PrimerDocument3 pagesSteelKote EP ZN HS: High-Build Zinc-Rich Epoxy Primerprasanth cp100% (1)
- Sample Purchase Specification For ClariflocculatorDocument1 pageSample Purchase Specification For Clariflocculatorcontactdevansh1174No ratings yet
- Friction Factor For Turbulent Pipe Flow: January 2006Document17 pagesFriction Factor For Turbulent Pipe Flow: January 2006John AnthoniNo ratings yet
- 1 s2.0 S0038080612000790 Main PDFDocument16 pages1 s2.0 S0038080612000790 Main PDFJuanSebastianGamezNo ratings yet
- AMS Thread Size ChartDocument4 pagesAMS Thread Size Chartarunvelu_1250% (2)
- Product Design Recommended Reading ListDocument3 pagesProduct Design Recommended Reading ListSai Prasath100% (1)
- Application of PLC and SCADA in Auto-Control Systems For Silo Grain HandlingDocument4 pagesApplication of PLC and SCADA in Auto-Control Systems For Silo Grain Handlingshahid_scribdNo ratings yet
- Smart Structural Protective Packaging Design Approach For Handicrafts ProductsDocument12 pagesSmart Structural Protective Packaging Design Approach For Handicrafts ProductsNohaNo ratings yet
- Lec 958975Document19 pagesLec 958975Rajasekar PichaimuthuNo ratings yet
- Lab5 AnswerSheetDocument3 pagesLab5 AnswerSheetnislam57No ratings yet
- GD&T Training Levels and ServicesDocument1 pageGD&T Training Levels and ServicesdramiltNo ratings yet
- P1 Conservation and Dissipation of Energy Student Book AnswersDocument11 pagesP1 Conservation and Dissipation of Energy Student Book AnswersjoeNo ratings yet
- Internet Controlled Multifunctional UGV For SurvellianceDocument74 pagesInternet Controlled Multifunctional UGV For SurvellianceMd Khaled NoorNo ratings yet
- End All Red Overdrive: Controls and FeaturesDocument6 pagesEnd All Red Overdrive: Controls and FeaturesBepe uptp5aNo ratings yet
- Setting vpn1Document10 pagesSetting vpn1Unink AanNo ratings yet
- Design of A Fluidized Drum GranulatorDocument6 pagesDesign of A Fluidized Drum GranulatorditchcheNo ratings yet
- Motion ReportDocument2 pagesMotion Reportmikeb-erau100% (2)
- 6GK52160BA002AA3 Datasheet en PDFDocument6 pages6GK52160BA002AA3 Datasheet en PDFgrace lordiNo ratings yet
- QADocument170 pagesQASudama KhatriNo ratings yet
- Consolidation: By. Rajesh S.GujarDocument33 pagesConsolidation: By. Rajesh S.Gujardarshan_dave17No ratings yet
- VGS 8.1.2 Rev.20 - UTDocument29 pagesVGS 8.1.2 Rev.20 - UTPaul-Petrus MogosNo ratings yet
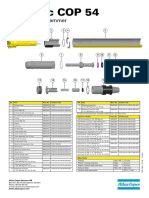
- 9853 1239 01 - COP 54 Service Poster - LOWDocument1 page9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasNo ratings yet