You might also like
- Simulating Quadrotor UAVs in Outdoor ScenariosDocument7 pagesSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaNo ratings yet
- CS231A Course Notes 1: Camera Models: Kenji Hata and Silvio SavareseDocument17 pagesCS231A Course Notes 1: Camera Models: Kenji Hata and Silvio SavareseherusyahputraNo ratings yet
- Demystifying Geometric Camera Calibration For Intrinsic Matrix - BitsMakeMeCrazy - BR - Kushal Vyas's BlogDocument14 pagesDemystifying Geometric Camera Calibration For Intrinsic Matrix - BitsMakeMeCrazy - BR - Kushal Vyas's BlogAMINA M SNo ratings yet
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocument15 pagesA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinNo ratings yet
- SystemVision Intro TrainingDocument205 pagesSystemVision Intro TrainingRafael SouzaNo ratings yet
- A Flexible New Technique For Camera CalibrationDocument40 pagesA Flexible New Technique For Camera CalibrationMade TokeNo ratings yet
- Buat Camera Thermal DGN ArduinoDocument4 pagesBuat Camera Thermal DGN ArduinoelkaNo ratings yet
- Image-Based Face Detection and Recognition Using MATLABDocument4 pagesImage-Based Face Detection and Recognition Using MATLABIjcemJournal100% (1)
- Spherical Vtol UavDocument11 pagesSpherical Vtol UavPranab PrustyNo ratings yet
- Uav 01 PDFDocument62 pagesUav 01 PDFSahil GargNo ratings yet
- Zhihui X (2008) Computer - Vision, I-TechDocument549 pagesZhihui X (2008) Computer - Vision, I-TechDonato FormicolaNo ratings yet
- Deep-Drone-Object 2Document8 pagesDeep-Drone-Object 2Samuel BrandNo ratings yet
- Presented By: Ranjeet Singh Sachin AnandDocument24 pagesPresented By: Ranjeet Singh Sachin AnandSachin AnandNo ratings yet
- Hybrid PID LQ Quadrotor ControllerDocument14 pagesHybrid PID LQ Quadrotor ControllerGhada BeydounNo ratings yet
- Robot VisionDocument40 pagesRobot VisionSurya KalsiNo ratings yet
- Convolutional Neural NetworksDocument13 pagesConvolutional Neural NetworksSrikanth YadavNo ratings yet
- Computer VisionDocument4 pagesComputer VisionSurya Mani SharmaNo ratings yet
- RobotDocument132 pagesRobotPhong Ngo100% (1)
- Atmel Studio Integrated Development Environment With FreeRTOS AwarenessDocument8 pagesAtmel Studio Integrated Development Environment With FreeRTOS AwarenessAshok ObuliNo ratings yet
- Validation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABDocument6 pagesValidation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABNancy RodriguezNo ratings yet
- Modelling & Control of A QuadrotorDocument15 pagesModelling & Control of A Quadrotorvidc87No ratings yet
- VHDL Test Bench For Digital Image Processing SystemsDocument10 pagesVHDL Test Bench For Digital Image Processing SystemsMoazh TawabNo ratings yet
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument22 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetNo ratings yet
- Autopilot 31Document51 pagesAutopilot 31Pramod Kumar100% (1)
- Seed Plant Drone For ReforestationDocument15 pagesSeed Plant Drone For ReforestationYusli Wbti IndrawanNo ratings yet
- Brock Technologies Antenna Pointing System V2 BrochureDocument1 pageBrock Technologies Antenna Pointing System V2 BrochureUAVs AustraliaNo ratings yet
- Robotic Vision Systems: Dr. A. R. Jayan, ECE Dept., GEC SreekrishnapuramDocument22 pagesRobotic Vision Systems: Dr. A. R. Jayan, ECE Dept., GEC SreekrishnapuramAravind R KrishnanNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Intelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesDocument285 pagesIntelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesTushar KoulNo ratings yet
- Quadcopter Dynamics and Simulation - Andrew GibianskyDocument24 pagesQuadcopter Dynamics and Simulation - Andrew GibianskywelltonarrudaNo ratings yet
- Project 1 - Robotic ArmDocument19 pagesProject 1 - Robotic ArmAizzat ZackNo ratings yet
- "Object Detection With Yolo": A Seminar OnDocument14 pages"Object Detection With Yolo": A Seminar OnSHRINIVAS BHUSANNAVARNo ratings yet
- Self Balancing Robot PDFDocument12 pagesSelf Balancing Robot PDFVickey VigneshNo ratings yet
- Pitch Control System PDFDocument6 pagesPitch Control System PDFGraig LenoNo ratings yet
- Sampling Image Video ProcessingDocument19 pagesSampling Image Video ProcessingSrinivas ReddyNo ratings yet
- Human Upper Limb and Arm Kinematics For Robot Based RehabilitationDocument6 pagesHuman Upper Limb and Arm Kinematics For Robot Based RehabilitationSarut PanjanNo ratings yet
- Presentation From December 12, 2000 Dinner MeetingDocument26 pagesPresentation From December 12, 2000 Dinner MeetingincosewmaNo ratings yet
- Design and Development of Robotic Arm For Cutting TreeDocument10 pagesDesign and Development of Robotic Arm For Cutting TreeMarko IvanovicNo ratings yet
- Modelling and Control of A QuadrocopterDocument10 pagesModelling and Control of A QuadrocopterAdi Mulyadi100% (1)
- Traffic Analysis Based On Digital Image Processing in PythonDocument7 pagesTraffic Analysis Based On Digital Image Processing in Pythonpraveena.sNo ratings yet
- Report MISHRA ARIA ASI PDFDocument47 pagesReport MISHRA ARIA ASI PDFPablo Fernández de la Granja100% (2)
- Quad Copter PresentationDocument19 pagesQuad Copter Presentationjunaid 786No ratings yet
- TwincopterDocument5 pagesTwincopterRinson RajNo ratings yet
- ANN ProjectDocument38 pagesANN ProjectmaheshkundrapuNo ratings yet
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Advantages and Disadvantages of RTOSDocument5 pagesAdvantages and Disadvantages of RTOSEulises QuinteroNo ratings yet
- ANN MatlabDocument13 pagesANN MatlabprashmceNo ratings yet
- Face Recognition TechnologyDocument27 pagesFace Recognition TechnologyabualsNo ratings yet
- Introduction To Control Engineering: Andy Pomfret and Tim ClarkeDocument54 pagesIntroduction To Control Engineering: Andy Pomfret and Tim ClarkemmmNo ratings yet
- A Literature Survey On Applications of Image Processing For Video SurveillanceDocument3 pagesA Literature Survey On Applications of Image Processing For Video SurveillanceInternational Journal of Innovative Science and Research Technology0% (1)
- Ics2307 Simulation and ModellingDocument79 pagesIcs2307 Simulation and ModellingOloo PunditNo ratings yet
- DRS Pixhawk 2 17th March 2016Document29 pagesDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaNo ratings yet
- Autonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofDocument9 pagesAutonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofArun GopinathNo ratings yet
- Robotics Chapter 5 - Robot VisionDocument7 pagesRobotics Chapter 5 - Robot Visiontutorfelix777No ratings yet
- Model-Based and System-Based Design: Writing S-FunctionsDocument556 pagesModel-Based and System-Based Design: Writing S-FunctionsMinhHà100% (1)
- Project Report On: Currency Detection Using OpencvDocument17 pagesProject Report On: Currency Detection Using Opencvsharma anupNo ratings yet
- Thesis PDFDocument86 pagesThesis PDFDjalal HoucineNo ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Interfacing of Micro Processor & Micro ControllerDocument9 pagesInterfacing of Micro Processor & Micro ControllerVp Hari NandanNo ratings yet
- Verbal ReasoningDocument10 pagesVerbal ReasoningsanjuNo ratings yet
- Precision Features of Delta RobotDocument13 pagesPrecision Features of Delta RobotVp Hari NandanNo ratings yet
- Foundry TechnologyDocument28 pagesFoundry TechnologyVp Hari NandanNo ratings yet
- An Overview of Machine Learning MethodsDocument7 pagesAn Overview of Machine Learning MethodsMedichamNo ratings yet
- 3.multilayer PerceptronDocument7 pages3.multilayer PerceptronShreyas ParajNo ratings yet
- 80879v00 Deep Learning Ebook PDFDocument15 pages80879v00 Deep Learning Ebook PDFmikeNo ratings yet
- Neural Road Semantic Segmentation in Driving Scenarios PDFDocument6 pagesNeural Road Semantic Segmentation in Driving Scenarios PDFdavidiancuNo ratings yet
- Nanoelectronics - VtuDocument2 pagesNanoelectronics - VtuVa Su50% (2)
- Machine Learning Techniques: Important Questions Unit-1Document8 pagesMachine Learning Techniques: Important Questions Unit-1Healthy WorldNo ratings yet
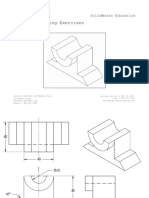
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationLal Krrish MikeNo ratings yet
- Autoencoders - PresentationDocument18 pagesAutoencoders - PresentationPhenil BuchNo ratings yet
- CVPR 2022 MainConference ProgramGuide FinalDocument70 pagesCVPR 2022 MainConference ProgramGuide FinalGlory ChenNo ratings yet
- Deep Learning Totally From ScratchDocument52 pagesDeep Learning Totally From Scratchbert hubertNo ratings yet
- Artificial IntelligenceDocument18 pagesArtificial IntelligencevaldhasanNo ratings yet
- Neural Network & Fuzzy LogicDocument5 pagesNeural Network & Fuzzy LogicSadia AkterNo ratings yet
- Polymer NanocompositesDocument24 pagesPolymer Nanocompositesssm_majeedNo ratings yet
- Fundamentals of Robot: Dr.S.Kalaimagal Assistant Professor, College of EngineeringDocument35 pagesFundamentals of Robot: Dr.S.Kalaimagal Assistant Professor, College of EngineeringKarnataka TourNo ratings yet
- Neural - N - Problems - MLPDocument15 pagesNeural - N - Problems - MLPAbdou AbdelaliNo ratings yet
- Quartile & List of JournalsDocument4 pagesQuartile & List of Journalsyr48No ratings yet
- Python数据科学速查表 - Scikit-LearnDocument1 pagePython数据科学速查表 - Scikit-LearnKeith NgNo ratings yet
- Photoshop AiDocument2 pagesPhotoshop AiHitesh ChaudhariNo ratings yet
- Teachable Machines Arduino: Seed Sorter Using ANDDocument4 pagesTeachable Machines Arduino: Seed Sorter Using ANDAmira SaidNo ratings yet
- Ai in Military Drones and Uavs - Current Applications: Machine VisionDocument6 pagesAi in Military Drones and Uavs - Current Applications: Machine VisionRashid Abu abdoonNo ratings yet
- CPP Registration FormDocument2 pagesCPP Registration Form14 - Prasad BhotNo ratings yet
- Artificial Intelligence in RoboticsDocument11 pagesArtificial Intelligence in RoboticsAbu RayhanNo ratings yet
- Contact: Marina Levina Boston Dynamics 617-868-5600 ExtDocument2 pagesContact: Marina Levina Boston Dynamics 617-868-5600 Extapi-25891623No ratings yet
- CNN For Deep Learning - Convolutional Neural NetworksDocument10 pagesCNN For Deep Learning - Convolutional Neural Networkschowsaj9No ratings yet
- Obstacle Detection Robot PDFDocument2 pagesObstacle Detection Robot PDFJenniferNo ratings yet
- Axyl Kent Rubin Galacio - BSMT-1A - GEC STSDocument2 pagesAxyl Kent Rubin Galacio - BSMT-1A - GEC STSAxyl GalacioNo ratings yet
- Machine Learning WikiDocument2 pagesMachine Learning Wikiatul.jha2545No ratings yet
- MRI Brain Image Classification Using Various Deep LearningDocument18 pagesMRI Brain Image Classification Using Various Deep LearningRohit AryaNo ratings yet