You might also like
- Manual Reiki Nivel 2Document28 pagesManual Reiki Nivel 2Francisco Dazarola BurboaNo ratings yet
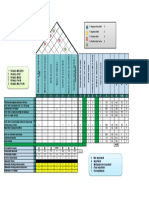
- Casa de La Calidad QDF MicehllDocument1 pageCasa de La Calidad QDF Micehllfer ChirinosNo ratings yet
- Culto A La PacchamamaDocument6 pagesCulto A La PacchamamaMamerto Huaman AyteNo ratings yet
- Osho Libro NaranjaDocument4 pagesOsho Libro NaranjaNandaKumaraDas100% (1)
- Rv-Plan de Dearrollo Turistico Del Canton Rioverde.Document141 pagesRv-Plan de Dearrollo Turistico Del Canton Rioverde.KARLA DAYANARA QUINTERO BECERRANo ratings yet
- Unidad de Aprendizaje Del Mes de Junio 5 AñosDocument22 pagesUnidad de Aprendizaje Del Mes de Junio 5 AñosVíctor Jesús Fajardo CárdenasNo ratings yet
- Energía - Andreas KalckerDocument4 pagesEnergía - Andreas KalckerLuis GualdronNo ratings yet
- Formato Densidad de Campo - Bahia L-1132 Kiman Ayllu, BSL, BTC-T, BTC-S, BTC-RDocument4 pagesFormato Densidad de Campo - Bahia L-1132 Kiman Ayllu, BSL, BTC-T, BTC-S, BTC-RLuis Mariano Villavicencio UbillusNo ratings yet
- Progr. Sem. Fouc. DeleuzeDocument5 pagesProgr. Sem. Fouc. DeleuzeAndrés AristizabalNo ratings yet
- UntitledDocument7 pagesUntitledHØCK SHØTNo ratings yet
- Sucesiones Numéricas Con MultiplicaciónDocument6 pagesSucesiones Numéricas Con MultiplicaciónSusan Gastelú100% (1)
- Plan de Desarrollo Municipal Teorama 20162019Document134 pagesPlan de Desarrollo Municipal Teorama 20162019Karol Bibiana AlvarezNo ratings yet
- Lubricacion PDFDocument196 pagesLubricacion PDFuriasNo ratings yet
- Peritaje ZootecnicoDocument7 pagesPeritaje ZootecnicoLuis Ignacio Herrera HernandezNo ratings yet
- CLASE 3.1 Estructura CristalinaDocument22 pagesCLASE 3.1 Estructura CristalinajoselopyNo ratings yet
- Qué Es Justo A TiempoDocument2 pagesQué Es Justo A Tiempocarlos escobarNo ratings yet
- 3 Cinetica QuimicaDocument29 pages3 Cinetica QuimicaDamián Alexander100% (1)
- Sacha TextilDocument3 pagesSacha TextilCarla PameNo ratings yet
- Materia SecaDocument12 pagesMateria SecaIsmael Alessandro Peña CoronadoNo ratings yet
- Registro de Evaluación: Estado - OFICIALDocument3 pagesRegistro de Evaluación: Estado - OFICIALJesús Huancayo HermandadNo ratings yet
- Batan GrandeDocument18 pagesBatan GrandeanitaobandoNo ratings yet
- López Piñero, Química y Medicina. Paracelso 1972Document22 pagesLópez Piñero, Química y Medicina. Paracelso 1972aguilafuenteNo ratings yet
- Metodologias Vulnerabildad Sismica 2016 OLARTEDocument60 pagesMetodologias Vulnerabildad Sismica 2016 OLARTEMarden Rengifo RuizNo ratings yet
- Clase Teorica Tema 3 InfectologiaDocument62 pagesClase Teorica Tema 3 InfectologiaJhomaira SaviNo ratings yet
- La Fauna en El Ecosistema Del Desierto-Mario Tenorio MaldonadoDocument4 pagesLa Fauna en El Ecosistema Del Desierto-Mario Tenorio MaldonadoAlexis Huamani GalindoNo ratings yet
- Informe 1Document5 pagesInforme 1Jhan Carlos PajueloNo ratings yet
- ApantarrayosDocument40 pagesApantarrayosArmando GalvanNo ratings yet
- Conocimiento y Usos Medicinales Del Azumiate o JarillaDocument7 pagesConocimiento y Usos Medicinales Del Azumiate o JarillaJosé Carlos GutiérrezNo ratings yet
- Diseño de Concreto FC 175 - 210 Aire y PlastificanteDocument4 pagesDiseño de Concreto FC 175 - 210 Aire y PlastificanteRase Valdivia YacilaNo ratings yet