You might also like
- Manual Completo Medida KOBANDocument82 pagesManual Completo Medida KOBANcperez2205No ratings yet
- Newton RaphsonDocument38 pagesNewton Raphsonyacerque100% (30)
- Informe Final 4 Control Digital1Document10 pagesInforme Final 4 Control Digital1Nico PerezNo ratings yet
- 1.3 D.F.SDocument21 pages1.3 D.F.STony LaderaNo ratings yet
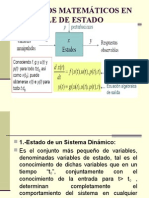
- 1.4.-Modelos Mat Sistemas DinámicosDocument18 pages1.4.-Modelos Mat Sistemas DinámicosWalkar NANo ratings yet
- 1.7.-Controladores y Compensadores Con OPAMPDocument22 pages1.7.-Controladores y Compensadores Con OPAMPHP_PaulNo ratings yet
- Padron de Mantenimiento 2015-IIDocument6 pagesPadron de Mantenimiento 2015-IIWalkar NANo ratings yet
- FrnaciaDocument52 pagesFrnaciaWalkar NANo ratings yet
- Practica N°01 AislamientoDocument2 pagesPractica N°01 AislamientoFrank GalvanNo ratings yet
- Primer Curso de Extensión ProfesionalDocument1 pagePrimer Curso de Extensión ProfesionalWalkar NANo ratings yet
- Método de Newton para Funciones de Varias VariablesDocument15 pagesMétodo de Newton para Funciones de Varias VariablesOscar Manuel Cisneros DuqueNo ratings yet
- 1.7.-Controladores y Compensadores Con OPAMPDocument22 pages1.7.-Controladores y Compensadores Con OPAMPHP_PaulNo ratings yet
- Practica N°08 IluminacionDocument1 pagePractica N°08 IluminacionFrank GalvanNo ratings yet
- 3 1 - LGRDocument24 pages3 1 - LGRWalkar NANo ratings yet
- Reglamento ElectricoDocument27 pagesReglamento Electricorash2767% (3)
- APOT Manual PDFDocument16 pagesAPOT Manual PDFDaniel RodriguezNo ratings yet
- Arranque Motor Asinc TrifasDocument21 pagesArranque Motor Asinc TrifasWalkar NANo ratings yet
- COnclusiones y Recomendaciones Resitecia de TierraDocument1 pageCOnclusiones y Recomendaciones Resitecia de TierraWalkar NANo ratings yet
- Eqq ComponentesDocument12 pagesEqq ComponentesWalkar NANo ratings yet
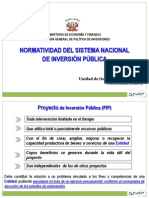
- 2977 Normatividad Sist Nac de Inv PublicaDocument42 pages2977 Normatividad Sist Nac de Inv PublicaWalkar NANo ratings yet
- Informe Tecnico Resistividad Quelle S.A.Document12 pagesInforme Tecnico Resistividad Quelle S.A.daniel_44ska100% (1)
- Padron de Mantenimiento 2015-IIDocument6 pagesPadron de Mantenimiento 2015-IIWalkar NANo ratings yet
- Evaluacion de Desempeño 2015Document34 pagesEvaluacion de Desempeño 2015Samantha BecquerNo ratings yet
- Prueba 4° Entrada 2014 MatematicaDocument9 pagesPrueba 4° Entrada 2014 MatematicapolankamatrixNo ratings yet
- Historiadelaelectricidad 110215063326 Phpapp01Document63 pagesHistoriadelaelectricidad 110215063326 Phpapp01Walkar NANo ratings yet
- ExcitacionproteccionDocument30 pagesExcitacionproteccionWalkar NANo ratings yet
- Director Como Lider PedagógicoDocument21 pagesDirector Como Lider PedagógicoAntonietta WettelNo ratings yet
- Simulacion Semana 06Document3 pagesSimulacion Semana 06Walkar NANo ratings yet
- Variadores 131210090338 Phpapp02Document15 pagesVariadores 131210090338 Phpapp02Walkar NANo ratings yet
- LipidsDocument19 pagesLipidsWalkar NANo ratings yet
- Mederos. Erratas Libro Edicion 1Document4 pagesMederos. Erratas Libro Edicion 1Kokoloco KokoNo ratings yet
- Silabo de Calculo Dif e Integral - FieeDocument10 pagesSilabo de Calculo Dif e Integral - FieeGerardo Jhunior Torres RiquerosNo ratings yet
- Planeacion B2 - 2Document3 pagesPlaneacion B2 - 2Itzel FtNo ratings yet
- Ejercicio1 Fisica GeneralDocument2 pagesEjercicio1 Fisica GeneralRicardo SanchezNo ratings yet
- ScriptsDocument5 pagesScriptsIvan Jahuira CervantesNo ratings yet
- Reporte - Ecuaciones Diferenciales - Fracciones Parciales .Saul HTDocument4 pagesReporte - Ecuaciones Diferenciales - Fracciones Parciales .Saul HTEdgarNo ratings yet
- Informe ArcoDocument8 pagesInforme ArcoJeimy Bello VásquezNo ratings yet
- Ecuaciones II - Semianual IDocument33 pagesEcuaciones II - Semianual IRenzo SantillanNo ratings yet
- Sesión 5 Teoría de Errores PDFDocument34 pagesSesión 5 Teoría de Errores PDFyordy yglesias100% (1)
- Carrera Logística y Transporte UTPL Distancia 40 HorasDocument5 pagesCarrera Logística y Transporte UTPL Distancia 40 HorasJOnhanOfficialTvNo ratings yet
- Ecuaciones e InecuacionesDocument2 pagesEcuaciones e InecuacionesmatematicapararmarNo ratings yet
- Curvas Caracteristicas de Bombas Centrifugas Prac 21Document7 pagesCurvas Caracteristicas de Bombas Centrifugas Prac 21Aaron GodoyNo ratings yet
- Informe Previo N°2Document21 pagesInforme Previo N°2Dónovan BacilioNo ratings yet
- Cómo hacer panquequesDocument12 pagesCómo hacer panquequesCristianRoblesNo ratings yet
- Gradientes Matematica Financiera Ejercicios ResueltosDocument3 pagesGradientes Matematica Financiera Ejercicios ResueltosJessica0% (1)
- Practice 02 PDFDocument3 pagesPractice 02 PDFJhonny CorillocllaNo ratings yet
- Solucionario Estadística IIDocument13 pagesSolucionario Estadística IIEstefany Nataly Loza Paredes0% (1)
- Monografia de EncuestaDocument13 pagesMonografia de EncuestaNILDA YESSENIA SOTOMAYOR SOLISNo ratings yet
- Razones TrigonometricasDocument11 pagesRazones TrigonometricasCamila DitieriNo ratings yet
- Evaluacion de Induccion ExcelDocument3 pagesEvaluacion de Induccion ExcelDenis Surley Graciano JimenezNo ratings yet
- Reporte de investigación de operacionesDocument8 pagesReporte de investigación de operacionesAntonio LopezNo ratings yet
- Practica de Mate 3Document1 pagePractica de Mate 3Claudia C. VelasquezNo ratings yet
- Taller de Competencias - TPCC1 T1Document6 pagesTaller de Competencias - TPCC1 T1Wilson Olortiga LeonNo ratings yet
- P 8.3.8 Probabilidad TeóricaDocument2 pagesP 8.3.8 Probabilidad TeóricaSusana RodriguezNo ratings yet
- Presentación - TEMA 1 - IDMC - 2023Document26 pagesPresentación - TEMA 1 - IDMC - 2023inmaanavarro7No ratings yet
- Matematicas Cuarto - 1PDocument10 pagesMatematicas Cuarto - 1Pcarlos rubio muñozNo ratings yet
- FactorizaciónDocument3 pagesFactorizaciónalejandro amadoNo ratings yet
- Folder ComputoDocument15 pagesFolder ComputoJoseline Avilés ReyesNo ratings yet