You might also like
- 05 IRQ Timers PDFDocument26 pages05 IRQ Timers PDFFabio SplendorNo ratings yet
- Analise Da Resposta de Sistemas 3 Ordem Com Zero em 0Document11 pagesAnalise Da Resposta de Sistemas 3 Ordem Com Zero em 0Juliano RicardoNo ratings yet
- Lista Geometria AnalíticaDocument2 pagesLista Geometria AnalíticaJuliano RicardoNo ratings yet
- Gabarito2016 PDFDocument4 pagesGabarito2016 PDFJuliano RicardoNo ratings yet
- Compreendendo Dispositivos de Deteccao de FogoDocument9 pagesCompreendendo Dispositivos de Deteccao de FogoJuliano RicardoNo ratings yet
- Engenharia LogisticaDocument6 pagesEngenharia LogisticaJuliano RicardoNo ratings yet
- T CNT 1Document4 pagesT CNT 1ACS394041No ratings yet
- CMCIIADocument16 pagesCMCIIAJuliano RicardoNo ratings yet
- DomoticaDocument8 pagesDomoticaJuliano RicardoNo ratings yet
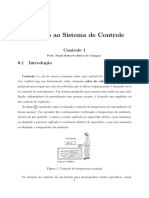
- Introducao Ao ControleDocument8 pagesIntroducao Ao ControleJuliano RicardoNo ratings yet
- Descrição Desafio Sebrae 2012-PROFESSORESxDocument2 pagesDescrição Desafio Sebrae 2012-PROFESSORESxJuliano RicardoNo ratings yet
- Capitulo 03 - Instrumentação IndustrialDocument7 pagesCapitulo 03 - Instrumentação IndustrialJuliano RicardoNo ratings yet
- Nube 30.8Document1 pageNube 30.8Juliano RicardoNo ratings yet
- Classes de Amplificadores de AudioDocument7 pagesClasses de Amplificadores de AudioFelipe ScheidtNo ratings yet
- DICAS de ESTUDO Prova Dia 22 Setembro 2014Document1 pageDICAS de ESTUDO Prova Dia 22 Setembro 2014Juliano RicardoNo ratings yet
- 2 Aula Térmica - ConduçãoDocument18 pages2 Aula Térmica - ConduçãoJuliano RicardoNo ratings yet
- Introducao Ao ControleDocument8 pagesIntroducao Ao ControleJuliano RicardoNo ratings yet
- 76UTDocument40 pages76UTJuliano RicardoNo ratings yet
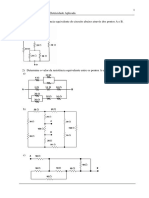
- 1a Lista de Exercícios-Elet AplicadaDocument3 pages1a Lista de Exercícios-Elet AplicadaJuliano RicardoNo ratings yet
- Mercado Linha BrancaDocument9 pagesMercado Linha BrancaJuliano RicardoNo ratings yet
- Artigo Sedimentador - Kynck e Biscaia JRDocument9 pagesArtigo Sedimentador - Kynck e Biscaia JRÉder AlvesNo ratings yet
- Psicossomática - A Dor e A Expressão Dos SentimentosDocument19 pagesPsicossomática - A Dor e A Expressão Dos Sentimentosmichelpachiega100% (2)
- CCE1596 Aula03Document47 pagesCCE1596 Aula03Projeto de EngenheiroNo ratings yet
- Relatório de Pratica Física Experimental 1Document8 pagesRelatório de Pratica Física Experimental 1Antônio Pereira Soares JuniorNo ratings yet
- Introdução À Física I Tema 1: Ferramentas Matemáticas para o Estudo de FísicaDocument29 pagesIntrodução À Física I Tema 1: Ferramentas Matemáticas para o Estudo de FísicaLucindaNo ratings yet
- Relatorio 5Document6 pagesRelatorio 5ThiagoNo ratings yet
- A Caminho de Casa - A Criação Segundo o SufismoDocument12 pagesA Caminho de Casa - A Criação Segundo o Sufismolivraria.tikunolamNo ratings yet
- 1 2 Analise de Circuitos Polifasicos PDFDocument18 pages1 2 Analise de Circuitos Polifasicos PDFRejanne Melo100% (1)
- A Psicodinâmica Das CoresDocument30 pagesA Psicodinâmica Das CoresMadalena CarvalhoNo ratings yet
- 3 - Téc. Análise Sistemas TrifásicosDocument14 pages3 - Téc. Análise Sistemas TrifásicosgugaseibertNo ratings yet
- Deus Existe!-Albert EinsteinDocument20 pagesDeus Existe!-Albert EinsteinrailibconNo ratings yet
- Espefic Barramentos BlindadosDocument4 pagesEspefic Barramentos BlindadosTurma Peixoto de CastroNo ratings yet
- Dimensionamento Do RolamentoDocument71 pagesDimensionamento Do RolamentoMatheus BarbosaNo ratings yet
- Atividade Fisica 8 Ano Etapa 3 EletricidadeDocument9 pagesAtividade Fisica 8 Ano Etapa 3 EletricidadesahNo ratings yet
- Lista Exercícios Física Primeiro Ano - Velocidade MédiaDocument13 pagesLista Exercícios Física Primeiro Ano - Velocidade Médiaencrenca12No ratings yet
- SubestaçõesDocument110 pagesSubestaçõesEder Batista Junior100% (1)
- Aef11 Fich Form 3Document6 pagesAef11 Fich Form 3mariaeduardasimoesNo ratings yet
- Evolução Das Ideias Da FísicaDocument16 pagesEvolução Das Ideias Da FísicaLuiz Gustavo de Matos PaivaNo ratings yet
- Fernando Da Tacca - Imagem FotográficaDocument9 pagesFernando Da Tacca - Imagem FotográficaEttore Dias MedinaNo ratings yet
- 9 T3 V2-CorreçãoDocument5 pages9 T3 V2-CorreçãoMário MontesNo ratings yet
- Aula 2 SDE4100 Quimica GeralDocument20 pagesAula 2 SDE4100 Quimica GeralRENATO MOURANo ratings yet
- Lista de Problemas III - Resistência IDocument2 pagesLista de Problemas III - Resistência ICarlosAntônioNo ratings yet
- Simulado Ita Comentario ProvaDocument35 pagesSimulado Ita Comentario ProvaMIKENo ratings yet
- Rappaport - Psicologia Do Desenvolvimento - Vol 4Document93 pagesRappaport - Psicologia Do Desenvolvimento - Vol 4Anonymous QOAATBV0% (1)
- O Segredo Da Luz - Walter Russell (The Secret of LightDocument171 pagesO Segredo Da Luz - Walter Russell (The Secret of LightPriscila Morais50% (2)
- Glossário Sobre Teoria Do Desenvolvimento Motor - 1Document7 pagesGlossário Sobre Teoria Do Desenvolvimento Motor - 1Rute RêgoNo ratings yet
- Material Treliça para o ImeDocument18 pagesMaterial Treliça para o ImelagostinhaNo ratings yet
- Introducao A Cinesiologia Holistica PDFDocument11 pagesIntroducao A Cinesiologia Holistica PDFLindolfo EuqueresNo ratings yet
- Lista 3 Mecânica 1Document2 pagesLista 3 Mecânica 1Anderson Martins LeiteNo ratings yet
- Humidade Ascencional - Vasco Freitas - Patorreb 2018Document9 pagesHumidade Ascencional - Vasco Freitas - Patorreb 2018Rodolfo Shamá100% (1)