You might also like
- Full Authority Digital Engine Control FADEC System PDFDocument18 pagesFull Authority Digital Engine Control FADEC System PDFberjarry593875% (4)
- Control aircraft engines digitallyDocument4 pagesControl aircraft engines digitallyArjun AnduriNo ratings yet
- FADEC - Full-Authority Digital Engine ControlDocument44 pagesFADEC - Full-Authority Digital Engine Controlabsalar100% (5)
- Seminar Report On FadecDocument17 pagesSeminar Report On FadecMithil Pandey100% (2)
- Smart Sensors and Actuators For Distributed FADEC SystemsDocument11 pagesSmart Sensors and Actuators For Distributed FADEC SystemsEdwing William Salhuana MendozaNo ratings yet
- ATA-100 JASC CodesDocument72 pagesATA-100 JASC CodesaerostressNo ratings yet
- Fadec SystemDocument12 pagesFadec Systemkats2404100% (1)
- Fadec System PDFDocument2 pagesFadec System PDFKimNo ratings yet
- StandardAero - PW100 EngineDocument2 pagesStandardAero - PW100 EnginechanduNo ratings yet
- 737 Suppliers - Airframer Fullbook PDFDocument26 pages737 Suppliers - Airframer Fullbook PDFdidGivNo ratings yet
- Atr 600 SeriesbdDocument16 pagesAtr 600 SeriesbdErnest Olinic100% (1)
- Brochure CFM56 Fiches 2017 PDFDocument9 pagesBrochure CFM56 Fiches 2017 PDFpbonnetNo ratings yet
- Nacelle Design and SizingDocument34 pagesNacelle Design and SizingIan Kelly100% (1)
- CFM International CFM56 - Wikipedia, The Free EncyclopediaDocument24 pagesCFM International CFM56 - Wikipedia, The Free EncyclopediaVijayMaradimath100% (1)
- Aircraft Electric Power Systems: A Power Conversion PerspectiveDocument24 pagesAircraft Electric Power Systems: A Power Conversion PerspectiveversineNo ratings yet
- 05 - CH73,76 - Full Autority Digital Engine Control FADECDocument54 pages05 - CH73,76 - Full Autority Digital Engine Control FADECali100% (1)
- Pilatus Aircraft LTD PC 12 MMOPDocument8 pagesPilatus Aircraft LTD PC 12 MMOPJulian BermudezNo ratings yet
- HAL-DORNIER-228 Technical SpecificationsDocument25 pagesHAL-DORNIER-228 Technical SpecificationsPablo Sebastian Di GregorioNo ratings yet
- 5-Design, maintenance and diagnostics of aircraft and gas turbines (АКІ)Document21 pages5-Design, maintenance and diagnostics of aircraft and gas turbines (АКІ)Juliana SatizabalNo ratings yet
- At - 802 Rigging Procedures 2015Document15 pagesAt - 802 Rigging Procedures 2015Alexis KidemaNo ratings yet
- AFDX TutorialDocument24 pagesAFDX TutorialFernando LichtscheinNo ratings yet
- AO 2013 154 Final PDFDocument19 pagesAO 2013 154 Final PDFMorgen GumpNo ratings yet
- CF680EDocument5 pagesCF680Ecf34No ratings yet
- JT8D Engine MRO Services in ChristchurchDocument2 pagesJT8D Engine MRO Services in ChristchurchGreciaNo ratings yet
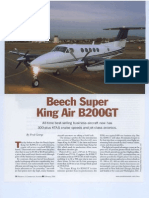
- Kingair b200gtDocument8 pagesKingair b200gtDid Yeah100% (1)
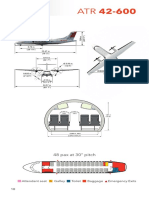
- 48 Pax at 30" Pitch: Attendant Seat Galley Toilet Baggage Emergency ExitsDocument2 pages48 Pax at 30" Pitch: Attendant Seat Galley Toilet Baggage Emergency ExitsEstebanNo ratings yet
- Turboprops TNG Manual PDFDocument21 pagesTurboprops TNG Manual PDFIvan Bastiani100% (1)
- Atr Pec Trimming ProcedureDocument5 pagesAtr Pec Trimming ProcedureKhaqan AliNo ratings yet
- EASA-TCDS-E.008 (IM) Pratt and Whitney Canada PT6A - 67 Series Engines-04-20122007Document9 pagesEASA-TCDS-E.008 (IM) Pratt and Whitney Canada PT6A - 67 Series Engines-04-20122007reza2224No ratings yet
- Review of Aircraft Fuel SystemDocument7 pagesReview of Aircraft Fuel SystemInternational Journal of Advance Research and Innovative Ideas in EducationNo ratings yet
- ATR LM ClassDocument30 pagesATR LM ClassKezia Sormin100% (1)
- TCDS E4ea PT6 PDFDocument22 pagesTCDS E4ea PT6 PDFGabriielLoopez100% (2)
- Hai 2014 - Aw109-119 Cab Pw206c Pw207c Pt6b-37a Engine UpdateDocument29 pagesHai 2014 - Aw109-119 Cab Pw206c Pw207c Pt6b-37a Engine UpdateIvan BastianiNo ratings yet
- O-320 (76 Series) Operator Manual 60297-22Document68 pagesO-320 (76 Series) Operator Manual 60297-22SammNo ratings yet
- CTC-232 Fda PDFDocument205 pagesCTC-232 Fda PDFashufriendluckyNo ratings yet
- Demo Systems PDL 30100 Manual Rev CDocument26 pagesDemo Systems PDL 30100 Manual Rev CEvandro Oliveira100% (1)
- TC Data Sheet E24NEDocument5 pagesTC Data Sheet E24NEMarlene SalazarNo ratings yet
- CFM EngineDocument12 pagesCFM Enginemenosoft0% (1)
- Throttle Linkage CheckDocument4 pagesThrottle Linkage Checkjbert55No ratings yet
- Foreign MROsDocument31 pagesForeign MROsDayakar RanaNo ratings yet
- TPE-331 Prop Governing SystemsDocument3 pagesTPE-331 Prop Governing SystemsReme Tim100% (1)
- Jet EngineDocument27 pagesJet Enginesetsection-b Ds UnivNo ratings yet
- Kushal Dhungana AB13 Professor: José Brigas and Pedro Alves: SevenairDocument13 pagesKushal Dhungana AB13 Professor: José Brigas and Pedro Alves: Sevenairuploadz upNo ratings yet
- Task Card JT8D (Install Fan Blade)Document3 pagesTask Card JT8D (Install Fan Blade)Raden BurhanNo ratings yet
- Avionics System (AVS) Aboard ATR - 600: ATA104-I General Familiarization Training CourseDocument19 pagesAvionics System (AVS) Aboard ATR - 600: ATA104-I General Familiarization Training CourseWilson Carlos SombiniNo ratings yet
- Full Authority Digital Engine ControlDocument17 pagesFull Authority Digital Engine Controlberjarry5938100% (2)
- HondaJet Elite BrochureDocument9 pagesHondaJet Elite Brochurelegoulu21100% (1)
- Dassault Falcon 7X VQ-BSN S/N 58: Preliminary Specifications and SummaryDocument7 pagesDassault Falcon 7X VQ-BSN S/N 58: Preliminary Specifications and SummaryNaili Bourhane Aboudou RahimeNo ratings yet
- GENXDocument2 pagesGENXmertberNo ratings yet
- CFMOilDebris PDFDocument62 pagesCFMOilDebris PDFShreyas PingeNo ratings yet
- Windshield ProtectionDocument3 pagesWindshield ProtectionLjubisa IgnjatovNo ratings yet
- Training Composite Aircraft Repairers: FeatureDocument5 pagesTraining Composite Aircraft Repairers: Featureflyingbeauty100% (1)
- Aircraft Interior Q4 2013Document116 pagesAircraft Interior Q4 2013lwang52No ratings yet
- Stabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesFrom EverandStabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesNo ratings yet
- FADECDocument5 pagesFADECdata16161616No ratings yet
- FadeccccDocument69 pagesFadeccccsugihnuNo ratings yet
- 05 Rocket Propulsion BasicsDocument5 pages05 Rocket Propulsion BasicsprasannabalajiNo ratings yet
- Unit 3Document19 pagesUnit 3prasannabalajiNo ratings yet
- Ae R2009Document171 pagesAe R2009prasannabalajiNo ratings yet
- Academic Calendar 2014 2015 StudentsDocument47 pagesAcademic Calendar 2014 2015 StudentsprasannabalajiNo ratings yet
- Cms Internal Test 2Document2 pagesCms Internal Test 2prasannabalajiNo ratings yet
- 02 Internal 2Document55 pages02 Internal 2prasannabalajiNo ratings yet
- Combustion KineticsDocument48 pagesCombustion KineticsadminchemNo ratings yet
- 05 Particle CombustionDocument2 pages05 Particle CombustionprasannabalajiNo ratings yet
- Introduction To Solid Rocket PropulsionDocument17 pagesIntroduction To Solid Rocket PropulsionSujay SreedharNo ratings yet
- 01 Rankine HugoniotDocument5 pages01 Rankine HugoniotprasannabalajiNo ratings yet
- 04 AfterburnersDocument4 pages04 AfterburnersprasannabalajiNo ratings yet
- Composite Unit2 2marksDocument3 pagesComposite Unit2 2marksprasannabalajiNo ratings yet
- 04 Combustion ChamberDocument6 pages04 Combustion ChamberprasannabalajiNo ratings yet
- 03 Internal 3Document78 pages03 Internal 3prasannabalajiNo ratings yet
- 01 Combustion TechniqueDocument82 pages01 Combustion TechniqueprasannabalajiNo ratings yet
- 00 Important TopicsDocument1 page00 Important TopicsprasannabalajiNo ratings yet
- Unit Iii Meaning and Significance of Statistical Process Control (SPC)Document7 pagesUnit Iii Meaning and Significance of Statistical Process Control (SPC)prasannabalajiNo ratings yet
- 03 Failure Theories in CompositesDocument16 pages03 Failure Theories in Compositesprasannabalaji100% (1)
- Composite Unit4 2marksDocument4 pagesComposite Unit4 2marksprasannabalajiNo ratings yet
- AbstractDocument1 pageAbstractprasannabalajiNo ratings yet
- Admin SixSigmaDocument26 pagesAdmin SixSigmaHaseeb BalochNo ratings yet
- Academic Calendar 2014 2015 StudentsDocument47 pagesAcademic Calendar 2014 2015 StudentsprasannabalajiNo ratings yet
- TQM Unit1 5 PDFDocument85 pagesTQM Unit1 5 PDFprasannabalajiNo ratings yet
- Composite Unit2 2marksDocument3 pagesComposite Unit2 2marksprasannabalajiNo ratings yet
- Cms Internal Test 2Document2 pagesCms Internal Test 2prasannabalajiNo ratings yet
- Cms Internal Test 3Document2 pagesCms Internal Test 3prasannabalajiNo ratings yet
- Unit 3Document19 pagesUnit 3prasannabalajiNo ratings yet
- Engine SelectionDocument22 pagesEngine SelectionprasannabalajiNo ratings yet
- Adp 2Document15 pagesAdp 2prasannabalajiNo ratings yet
- Air T Chapter 2Document41 pagesAir T Chapter 2prasannabalajiNo ratings yet
- Raising New Generation Leaders Through Mechanics EducationDocument88 pagesRaising New Generation Leaders Through Mechanics EducationOluwaferanmi OgunleyeNo ratings yet
- An Inexpensive BRDF Model For Physically-Based RenderingDocument14 pagesAn Inexpensive BRDF Model For Physically-Based RenderingKmilo VinaTea ChavezNo ratings yet
- Surveying Lecture 1Document39 pagesSurveying Lecture 1Ruel Torres50% (4)
- Where Is There Light in This Room?Document18 pagesWhere Is There Light in This Room?Casmara LyNo ratings yet
- MM1080 Ie 3Document3 pagesMM1080 Ie 3Paul RuckNo ratings yet
- Basics of Seismic Reservoir CharacterizationDocument30 pagesBasics of Seismic Reservoir Characterizationgodfrey edezuNo ratings yet
- Orientation of Students to Science TopicsDocument115 pagesOrientation of Students to Science TopicsShaynie Mhe Amar AntonioNo ratings yet
- Hibernia Study (Flare)Document178 pagesHibernia Study (Flare)bmgarisNo ratings yet
- Brightness Color MeterDocument4 pagesBrightness Color MeterkmacleonNo ratings yet
- Extraction in Chemical Technology PrincipleDocument24 pagesExtraction in Chemical Technology PrincipleFatima ZaharaNo ratings yet
- V Dy DT A DV DT: Indian Language School GR Xi Physics Worksheet-1 2022-23 Chapter: Motion in A Straight Line SolutionsDocument3 pagesV Dy DT A DV DT: Indian Language School GR Xi Physics Worksheet-1 2022-23 Chapter: Motion in A Straight Line SolutionsRudra RoshanNo ratings yet
- Standing WaveDocument31 pagesStanding WaveJeff GicharuNo ratings yet
- Newton's Law of Cooling ExplainedDocument7 pagesNewton's Law of Cooling ExplainedReggie DuenasNo ratings yet
- Maths Take Home Pack Gr.7 T3 W6Document24 pagesMaths Take Home Pack Gr.7 T3 W6Muhammed ChopdatNo ratings yet
- Co2 Removal Membrane TechnologyDocument32 pagesCo2 Removal Membrane TechnologyhecalsieNo ratings yet
- Lm331 AppnoteDocument8 pagesLm331 AppnoteEward KenNo ratings yet
- Handbook of Magnetic PDFDocument572 pagesHandbook of Magnetic PDFQassem MohaidatNo ratings yet
- Muhammad Imran YousufDocument1 pageMuhammad Imran YousufMuhammad Irfan YousufNo ratings yet
- Classification of The MeansDocument5 pagesClassification of The Meanserichamilt0n100% (2)
- Structural Design For ArchitectureDocument274 pagesStructural Design For Architecturedamocca100% (13)
- Design of Rotating Electrical Machines2Document531 pagesDesign of Rotating Electrical Machines2alirozNo ratings yet
- Engineering Statistics and Probability Chapter 3 PDFDocument25 pagesEngineering Statistics and Probability Chapter 3 PDFcarl domingoNo ratings yet
- High Frequency Circuit Design CourseDocument5 pagesHigh Frequency Circuit Design CourseadauNo ratings yet
- Part Description AD500-9 TO Order # 3001380: First Sensor APD Data SheetDocument3 pagesPart Description AD500-9 TO Order # 3001380: First Sensor APD Data SheetAnish KumarNo ratings yet
- Exploration Archaeology (John M. Stanley)Document4 pagesExploration Archaeology (John M. Stanley)henarroNo ratings yet
- ControlExperiments - Precision Modular ServoDocument43 pagesControlExperiments - Precision Modular ServoNachoSainzNo ratings yet
- Lec-02 (A) Computer GraphicsDocument27 pagesLec-02 (A) Computer GraphicsPranil NandeshwarNo ratings yet
- Coherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonDocument39 pagesCoherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonUmair IsmailNo ratings yet
- Comment On "The One-Dimensional Harmonic Oscillator PDFDocument2 pagesComment On "The One-Dimensional Harmonic Oscillator PDFJosé HoyosNo ratings yet
- 3 Basic Electrical EngineeringDocument4 pages3 Basic Electrical EngineeringJyothsna VayyalaNo ratings yet