You might also like
- Oral and Practical Review: Reflections on the Part 147 CourseFrom EverandOral and Practical Review: Reflections on the Part 147 CourseNo ratings yet
- Presentation Auto Pilot 1Document59 pagesPresentation Auto Pilot 1Shandy AvisenaNo ratings yet
- Session2 Item3 Honeywell Link 2000 Review 10-07-1Document17 pagesSession2 Item3 Honeywell Link 2000 Review 10-07-1mhaukom71No ratings yet
- Aircraft NavigationDocument28 pagesAircraft NavigationVinay Sriramoju100% (1)
- Helicopter ATPL - Study Guide - TP11954EDocument33 pagesHelicopter ATPL - Study Guide - TP11954EWilliam RiosNo ratings yet
- FAR-FC 2019: Federal Aviation Regulations for Flight CrewFrom EverandFAR-FC 2019: Federal Aviation Regulations for Flight CrewNo ratings yet
- AvionicsDocument2 pagesAvionicsJonatan BernalNo ratings yet
- How to buy and fly a quadcopter drone: a small guide and flight schoolFrom EverandHow to buy and fly a quadcopter drone: a small guide and flight schoolNo ratings yet
- Andys Unit 16 Ifis QuestionsDocument11 pagesAndys Unit 16 Ifis QuestionsLcfcfox1No ratings yet
- Presentation of Auto PilotDocument43 pagesPresentation of Auto PilotVenkatakumar Chowdary KarlakuntaNo ratings yet
- Aircraft Structures and System 1Document9 pagesAircraft Structures and System 1Zjian Wai100% (1)
- Getting To Grips With ALARDocument257 pagesGetting To Grips With ALARaske7sp8055No ratings yet
- Automated Flight ControlDocument16 pagesAutomated Flight Controlsarvesh_ame2011No ratings yet
- Avionics Is ADocument13 pagesAvionics Is ARiaz ShahNo ratings yet
- ILS PresentationDocument58 pagesILS PresentationJay ComajesNo ratings yet
- 9574 Manual On Implementation of A 300 M (1 000 FT) Vertical Separation Minimum Between FL 290 and FL 410 InclusiveDocument44 pages9574 Manual On Implementation of A 300 M (1 000 FT) Vertical Separation Minimum Between FL 290 and FL 410 InclusiveMauro SolorzanoNo ratings yet
- EFISDocument31 pagesEFISnishitmishra85100% (4)
- Ima (Ata 42)Document51 pagesIma (Ata 42)Kshitiz RastogiNo ratings yet
- Go Indigo GoDocument8 pagesGo Indigo GoAkshay PushpanNo ratings yet
- EFISDocument9 pagesEFISsangeetamanishkumarNo ratings yet
- Arinc - 629Document23 pagesArinc - 629milind71100% (1)
- Aircraft Instrument FudamentalsDocument39 pagesAircraft Instrument FudamentalsYadana1No ratings yet
- Autopilot ClassDocument34 pagesAutopilot ClassJose Luis OliverosNo ratings yet
- CAT B1 Module 05 Master PDFDocument438 pagesCAT B1 Module 05 Master PDFNouman LatifNo ratings yet
- Helicopter Weight and BalanceDocument4 pagesHelicopter Weight and BalanceAbdul Qadeer Khan100% (1)
- ACARSDocument42 pagesACARSanticlockwise180100% (3)
- Aircraft Instruments Systems (AMFI)Document88 pagesAircraft Instruments Systems (AMFI)Anees EkNo ratings yet
- ATA 22 AutoFlight-L1Document28 pagesATA 22 AutoFlight-L1svyat_kNo ratings yet
- AvionicsDocument15 pagesAvionicsapi-238146174100% (2)
- Airbus AbbreviationDocument46 pagesAirbus Abbreviationyeung875No ratings yet
- Arinc Standards LN - 13Document14 pagesArinc Standards LN - 13M S PrasadNo ratings yet
- Airbus A320 ATA 31 EIS PresentationDocument101 pagesAirbus A320 ATA 31 EIS Presentationcacad999No ratings yet
- TcasDocument15 pagesTcasKakumkum Blanco100% (1)
- EASA Module 13 - Book 1 Part 5 - Autoflight PDFDocument176 pagesEASA Module 13 - Book 1 Part 5 - Autoflight PDFAhmed AlrawahiNo ratings yet
- Flight Management SystemsDocument208 pagesFlight Management SystemsZoltan GyengeNo ratings yet
- 04 Aircraft Communications and NavigationDocument4 pages04 Aircraft Communications and NavigationManuel Azabache GrandezNo ratings yet
- Unit-1 Avionics ModifiedDocument127 pagesUnit-1 Avionics ModifiedVignesh Moorthy100% (9)
- 'Dokumen - Tips Fokker 50 Normal ChecklistDocument3 pages'Dokumen - Tips Fokker 50 Normal ChecklistJose Antonio Montiel Quiros100% (1)
- Fokker 50-Flight Navigation InstrumentsDocument93 pagesFokker 50-Flight Navigation InstrumentssaiNo ratings yet
- Oxygen SystemsDocument16 pagesOxygen SystemsSheril Joy ManimtimNo ratings yet
- Aircraft NavigationDocument30 pagesAircraft NavigationSahala Rgk50% (2)
- Flight Control - Anna University Fourth Semester - Aircraft System and InstrumentsDocument84 pagesFlight Control - Anna University Fourth Semester - Aircraft System and InstrumentsHêartìin PraveenNo ratings yet
- Exam AERO4306 2005december PDFDocument4 pagesExam AERO4306 2005december PDFjonthemesNo ratings yet
- Aircraft Flight Control SystemDocument187 pagesAircraft Flight Control SystemTahnia AyshiNo ratings yet
- Enhanced Ground Proximity Warning Systeme GPWS Rev eDocument95 pagesEnhanced Ground Proximity Warning Systeme GPWS Rev eSajjad Ghani100% (2)
- Avionics jETSTREAM31Document129 pagesAvionics jETSTREAM31Carlos Marquez100% (1)
- CAR 66 Module 5.10 Fibre OpticDocument25 pagesCAR 66 Module 5.10 Fibre OpticpontooNo ratings yet
- ServomechanismsDocument25 pagesServomechanismsEgor85No ratings yet
- Electronic Flight Instrument System 2Document23 pagesElectronic Flight Instrument System 2BookMaggotNo ratings yet
- Atr Lm3 AhrsDocument31 pagesAtr Lm3 AhrsKezia SorminNo ratings yet
- Aeroplane EssaysDocument12 pagesAeroplane EssayscollinsNo ratings yet
- Ejets v2 Manual 2.0.1Document129 pagesEjets v2 Manual 2.0.1aerolex25100% (1)
- Safa Expanded Checklist BoilerplateDocument78 pagesSafa Expanded Checklist Boilerplatediego montoyaNo ratings yet
- Gulfstream SV PFDDocument3 pagesGulfstream SV PFDArslanKhan100% (1)
- Aircraft Electrical GeneratorDocument714 pagesAircraft Electrical GeneratorPIYUSH100% (1)
- Pilot Guide Kfc200Document44 pagesPilot Guide Kfc200Javier100% (2)
- R05 Set No - 1Document4 pagesR05 Set No - 1Anirudh ReddyNo ratings yet
- Mpu 31231Document13 pagesMpu 31231JoycewongNo ratings yet
- Chapter 1 - Number and ArithmeticsDocument22 pagesChapter 1 - Number and ArithmeticsDamon LeongNo ratings yet
- Meeting of MinutesDocument4 pagesMeeting of MinutesDamon LeongNo ratings yet
- BAE Systems Jetstream 31 G-CCPW 10-12Document16 pagesBAE Systems Jetstream 31 G-CCPW 10-12Damon LeongNo ratings yet
- Chapter 4 - TrigonometryDocument18 pagesChapter 4 - TrigonometryDamon LeongNo ratings yet
- Chapter 13 - Rain Protection Control SystemDocument14 pagesChapter 13 - Rain Protection Control SystemDamon Leong100% (1)
- Chapter 12 - Aircraft De-Icing SystemDocument42 pagesChapter 12 - Aircraft De-Icing SystemDamon LeongNo ratings yet
- Hs 125 Part 2Document289 pagesHs 125 Part 2Damon Leong100% (1)
- Sample Policy StatementDocument1 pageSample Policy StatementDamon LeongNo ratings yet
- Chapter 3 - Passenger Compartment EquipmentDocument87 pagesChapter 3 - Passenger Compartment EquipmentDamon Leong100% (1)
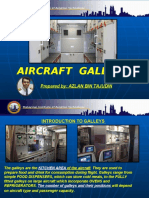
- Chapter 4 - Aircraft GalleyDocument40 pagesChapter 4 - Aircraft GalleyDamon Leong60% (5)
- Aircraft Cabin Interior System - AssignmentDocument2 pagesAircraft Cabin Interior System - AssignmentDamon Leong0% (1)
- Cabin AssignmentDocument33 pagesCabin AssignmentDamon Leong100% (1)
- 1 - Cabin Interior System - IntroductionDocument25 pages1 - Cabin Interior System - IntroductionDamon LeongNo ratings yet
- 2 - Flight Compartment EquipmentsDocument46 pages2 - Flight Compartment EquipmentsDamon LeongNo ratings yet
- Assignment 4Document2 pagesAssignment 4Damon LeongNo ratings yet
- Hs 125 Part 1Document209 pagesHs 125 Part 1Tarmizy MZaki100% (2)
- Oxygen Tank Removal Practical 1Document2 pagesOxygen Tank Removal Practical 1Damon LeongNo ratings yet
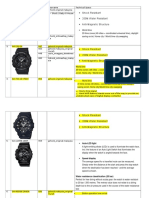
- Shock Resistant 200M Water Resistant Anti-Magnetic StructureDocument6 pagesShock Resistant 200M Water Resistant Anti-Magnetic StructureDamon LeongNo ratings yet
- HS-125 R6Document184 pagesHS-125 R6Damon Leong100% (1)
- BOOTSDocument9 pagesBOOTSDamon LeongNo ratings yet
- OperationalDocument4 pagesOperationalDamon LeongNo ratings yet
- Pneumatic System: Introduction: AdvantagesDocument3 pagesPneumatic System: Introduction: AdvantagesDamon LeongNo ratings yet
- Turbine Fuel SystemDocument66 pagesTurbine Fuel SystemDamon Leong100% (1)
- Mohamad Jamalulail Bin Hamzah: 12, JALAN USJ 6/6B, 47610 SUBANG JAYA, Selangor Darul EhsanDocument2 pagesMohamad Jamalulail Bin Hamzah: 12, JALAN USJ 6/6B, 47610 SUBANG JAYA, Selangor Darul EhsanDamon LeongNo ratings yet
- H YDRAULICS1Document1 pageH YDRAULICS1Damon LeongNo ratings yet
- Introducti On of Pneumati CDocument9 pagesIntroducti On of Pneumati CDamon LeongNo ratings yet
- Low Pressure System: PneumaticDocument1 pageLow Pressure System: PneumaticDamon LeongNo ratings yet
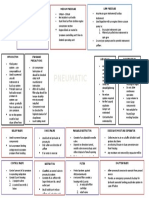
- Pneumatic: Low Pressure High Pressure Medium PressureDocument1 pagePneumatic: Low Pressure High Pressure Medium PressureDamon LeongNo ratings yet
- Hydraulics AssignmentDocument35 pagesHydraulics AssignmentDamon LeongNo ratings yet
- Knowledge Institute of Technology - Salem Mech Talk The New Pride From DassaultDocument15 pagesKnowledge Institute of Technology - Salem Mech Talk The New Pride From DassaultKISHORENo ratings yet
- Theory AssignmentDocument3 pagesTheory AssignmentDan WkNo ratings yet
- ASI Full NotesDocument171 pagesASI Full NotesmuthumariNo ratings yet
- Airbus Abreviation Dictionary PDFDocument78 pagesAirbus Abreviation Dictionary PDFLuis GonzálezNo ratings yet
- Module 5Document73 pagesModule 5Ravi TejaNo ratings yet
- What Is Need of Defining Various Avionics Architecture?Document4 pagesWhat Is Need of Defining Various Avionics Architecture?KiraNo ratings yet
- 14 Flight Control SystemDocument68 pages14 Flight Control SystemIvan MilosevicNo ratings yet
- Fly by WireDocument26 pagesFly by WirevarunNo ratings yet
- Impact of ControlDocument246 pagesImpact of ControlSubhasish MahapatraNo ratings yet
- Aviation AbbreviationsDocument90 pagesAviation AbbreviationsaeronauticNo ratings yet
- ToLiss AirbusA319 SimulationManualDocument89 pagesToLiss AirbusA319 SimulationManualasdadssadsad DSANo ratings yet
- The Basic Analysis of Control Systems On Commercial AircraftDocument7 pagesThe Basic Analysis of Control Systems On Commercial AircraftAzmah EskandriNo ratings yet
- A319-320-321 Flight Deck and Systems Briefing For PilotsDocument223 pagesA319-320-321 Flight Deck and Systems Briefing For PilotsDalia MuraddNo ratings yet
- Flight Controls System Presentation: A318/A319/A320/A321 General Familiarization Course Flight ControlsDocument42 pagesFlight Controls System Presentation: A318/A319/A320/A321 General Familiarization Course Flight ControlsvvNo ratings yet
- B777 Lesson 1 - Flight ControlDocument36 pagesB777 Lesson 1 - Flight Controlmoqmer92% (12)
- M.E. Avionics PDFDocument39 pagesM.E. Avionics PDFprabs20069178No ratings yet
- Soal Dan Jawaban Autopilot: Nama: Lois Figo Laurensz NIM: 17010021Document12 pagesSoal Dan Jawaban Autopilot: Nama: Lois Figo Laurensz NIM: 17010021figoNo ratings yet
- Introduction To Flight Control SystemsDocument34 pagesIntroduction To Flight Control SystemsshivaspyNo ratings yet
- Uber Elevate White PaperDocument98 pagesUber Elevate White PaperRoger AllanNo ratings yet
- F2022C00010Document152 pagesF2022C00010CNo ratings yet
- Chapter 1 Introduction 2013 Flight Dynamics PrinciplesDocument11 pagesChapter 1 Introduction 2013 Flight Dynamics PrinciplesMinseung KuNo ratings yet
- Flight ControlsDocument74 pagesFlight ControlsNino AngobNo ratings yet
- Aircraft Control SystemDocument145 pagesAircraft Control Systemabdel4aliNo ratings yet
- Generalized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Document73 pagesGeneralized Automatic and Augmented Manual Flight Control: Berlin Technical University Colloquium May 19, 2006Erick LeonardoNo ratings yet
- AIAA Paper Thesis Pepijn Post GraduationDocument35 pagesAIAA Paper Thesis Pepijn Post GraduationSamNo ratings yet
- Flight Controls ReviewDocument8 pagesFlight Controls ReviewromixrayzenNo ratings yet
- ASSIGNMENT 2 Jan 2020Document3 pagesASSIGNMENT 2 Jan 2020Afrina Putra100% (1)
- Digital Flight Control SystemDocument2 pagesDigital Flight Control SystemKannappan CtNo ratings yet
- Unit-5 Introduction To Avionic SystemDocument62 pagesUnit-5 Introduction To Avionic SystemVignesh Moorthy60% (5)
- ToLiss AirbusA319 V1.3.3 SimulationManualDocument50 pagesToLiss AirbusA319 V1.3.3 SimulationManualLORISNo ratings yet