You might also like
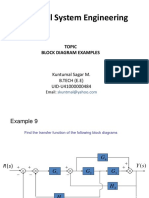
- Control System Engineering: Topic Block Diagram ExamplesDocument42 pagesControl System Engineering: Topic Block Diagram ExamplesjpatrNo ratings yet
- Block Diagram: Dr. Issam ELGMATIDocument32 pagesBlock Diagram: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Control Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & InstrumentationDocument27 pagesControl Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & Instrumentationzahid ullahNo ratings yet
- Control Principles: Tutorial #3 Block DiagramDocument27 pagesControl Principles: Tutorial #3 Block DiagramReagan TorbiNo ratings yet
- Chapter3 - Block Diagram - Reduction - 01-1Document27 pagesChapter3 - Block Diagram - Reduction - 01-1bayu laksanaNo ratings yet
- Regulation and Control Engineering: 2.4.1. Block Diagram Reduction TechniquesDocument24 pagesRegulation and Control Engineering: 2.4.1. Block Diagram Reduction Techniquestilahun modammedNo ratings yet
- CH 3 2Document27 pagesCH 3 2Magarsaa Qana'iiNo ratings yet
- Block Diagram Reduction Rules PDFDocument18 pagesBlock Diagram Reduction Rules PDFsvijiNo ratings yet
- Block Diagram Reduction Techniques: Control System EngineeringDocument24 pagesBlock Diagram Reduction Techniques: Control System EngineeringShreya TripathiNo ratings yet
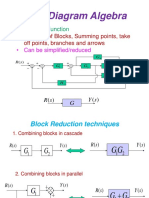
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- System Engineering ECE 451: Professor Dr. Hanan Ahmed KamalDocument38 pagesSystem Engineering ECE 451: Professor Dr. Hanan Ahmed KamalNoha IbrahimNo ratings yet
- Control Principles: Unit IDocument30 pagesControl Principles: Unit ISam potterNo ratings yet
- Tutorial 3Document2 pagesTutorial 3sanjaysr2226No ratings yet
- Block Diagram AlgebraDocument28 pagesBlock Diagram AlgebraSirshenduNo ratings yet
- 351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram ReductionDocument70 pages351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram Reductionmishal shakeelNo ratings yet
- Solution A3 NPTEL Control Engg Jan April 2020Document12 pagesSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- Gravity Dams Fluids 1 PDFDocument27 pagesGravity Dams Fluids 1 PDFChristian DayritNo ratings yet
- Control Systems - DIV B - Tutorial 1Document3 pagesControl Systems - DIV B - Tutorial 1Avadh VadhiyaNo ratings yet
- Block Diagram Reduction TechniquesDocument27 pagesBlock Diagram Reduction TechniquessreenathreddyNo ratings yet
- Block Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Document11 pagesBlock Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Dewashish KarmiyalNo ratings yet
- BLK and SFG PDFDocument48 pagesBLK and SFG PDFyeabsira gashawNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiTegarRochmad OddyPramantoNo ratings yet
- Block Diagram ReductionDocument26 pagesBlock Diagram Reductionmamnd tahaNo ratings yet
- Jadual Kalah Mati Dam AjiDocument9 pagesJadual Kalah Mati Dam AjisaqifahrazakNo ratings yet
- Block Diagram ReductionDocument3 pagesBlock Diagram ReductionAbhilash MohanNo ratings yet
- Control System Engineering: Topic Block Diagram RepresentationDocument24 pagesControl System Engineering: Topic Block Diagram RepresentationWaqas AfzalNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- Concept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyDocument23 pagesConcept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyHiral HiraniNo ratings yet
- Cen438 HW 1Document1 pageCen438 HW 1Esra ÜretenNo ratings yet
- M8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Document45 pagesM8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Shuvro Sankar SenNo ratings yet
- 2.4.1 Ej Diagrama de BloquesDocument1 page2.4.1 Ej Diagrama de BloquesJairo Andres Andrade ManzanoNo ratings yet
- Reduction of Complicated Block DiagramsDocument45 pagesReduction of Complicated Block Diagramstilahun modammedNo ratings yet
- SA2019-20 CHAPTER 1 Block DiagramDocument23 pagesSA2019-20 CHAPTER 1 Block DiagramMohamad Firdaus Ismal Hafis bin Mohd MokhtarNo ratings yet
- ch04 Sol 10thDocument37 pagesch04 Sol 10th김서진No ratings yet
- BodyR P2Document3 pagesBodyR P2Tom TomNo ratings yet
- Semana 3: Dr. Ignacio ChangDocument14 pagesSemana 3: Dr. Ignacio Changpathy cocreNo ratings yet
- نسخة من Control Tutorial 3Document16 pagesنسخة من Control Tutorial 3eslamelshrwedy2000No ratings yet
- Rx/ry Designation Area (Ag) KL/ry FCR Ø Floor Level Column MarkDocument4 pagesRx/ry Designation Area (Ag) KL/ry FCR Ø Floor Level Column MarkMarica ShaneNo ratings yet
- Maps - The Empty ThroneDocument6 pagesMaps - The Empty ThroneDaniel EricssonNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Operations On Graph PDFDocument5 pagesOperations On Graph PDFPranjal Das100% (1)
- S S S S F F F: Tutorial Chapter 2Document2 pagesS S S S F F F: Tutorial Chapter 2Amirul HarisNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- ALGEBRA DE BLOQUES (Ejercicios) 1.:) (1) (IdentificandoDocument4 pagesALGEBRA DE BLOQUES (Ejercicios) 1.:) (1) (Identificandojeferson javier jimenez merchanNo ratings yet
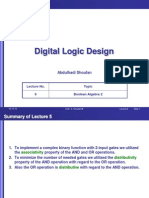
- Digital Logic Design: Abdulhadi ShoufanDocument12 pagesDigital Logic Design: Abdulhadi ShoufanMohammed ismail2010No ratings yet
- Tutorial 2Document4 pagesTutorial 2sanjaysr2226No ratings yet
- G Major Scale One Octave - Semibreve ViolinDocument1 pageG Major Scale One Octave - Semibreve ViolinHari ShakthiNo ratings yet
- Graphs: Data StructuresDocument38 pagesGraphs: Data Structures林昱兼No ratings yet
- Lathe Machine Program Manual (C Type)Document259 pagesLathe Machine Program Manual (C Type)ダンハイソンNo ratings yet
- ESP32 TestBoard v2.0.0.0 PMD SchematicDocument8 pagesESP32 TestBoard v2.0.0.0 PMD SchematicEliseo TravagliniNo ratings yet
- Block Diagram Reduction: Name: Nathan Shankar Reg No: 19BEE0381 Lab Slot: L43+L44 Faculty In-Charge: Geethanjali PDocument6 pagesBlock Diagram Reduction: Name: Nathan Shankar Reg No: 19BEE0381 Lab Slot: L43+L44 Faculty In-Charge: Geethanjali PNathan ShankarNo ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- A 5 G 5 G 4 G 4 F 4 F 3 E 3 E 2 D 2 D 2 C 1: Acordes Mano I Zqui Erda y Dedos Mano I Zqui ErdaDocument1 pageA 5 G 5 G 4 G 4 F 4 F 3 E 3 E 2 D 2 D 2 C 1: Acordes Mano I Zqui Erda y Dedos Mano I Zqui Erdachriss morantesNo ratings yet
- G27 G33 3:w/ Entry & Start System 4:w/o Entry & Start SystemDocument3 pagesG27 G33 3:w/ Entry & Start System 4:w/o Entry & Start SystemTom TomNo ratings yet
- CHEE319 Tutorial 4 SolnDocument13 pagesCHEE319 Tutorial 4 SolnyeshiduNo ratings yet
- 50MHz IRF510 Schematic PDFDocument1 page50MHz IRF510 Schematic PDFRainier Ledesma Acosta100% (1)
- 50MHz IRF510 Schematic PDFDocument1 page50MHz IRF510 Schematic PDFOshun76No ratings yet
- HVAC Course 2015Document107 pagesHVAC Course 2015MohamedAhmedFawzyNo ratings yet
- Residential Catalogue ECPEN14-017 Catalogues EnglishDocument72 pagesResidential Catalogue ECPEN14-017 Catalogues EnglishDani HambalinaNo ratings yet
- HVAC Course 2015Document1 pageHVAC Course 2015Mostafa AbdelalimNo ratings yet
- Space Input Data: G01 Conference RoomDocument15 pagesSpace Input Data: G01 Conference RoomMostafa AbdelalimNo ratings yet
- Sheet 01 Hydraulic ControlDocument7 pagesSheet 01 Hydraulic ControlMostafa AbdelalimNo ratings yet
- Space Name Floor Area Wall Exposure AreaDocument18 pagesSpace Name Floor Area Wall Exposure Areaمحمد عبداللهNo ratings yet
- Control Engineering Prof. S.D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 05Document29 pagesControl Engineering Prof. S.D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 05Mostafa AbdelalimNo ratings yet
- Calculation of U Value Simple ConstructionDocument5 pagesCalculation of U Value Simple ConstructionMostafa AbdelalimNo ratings yet
- People &lighting SI F09 Ch18Document2 pagesPeople &lighting SI F09 Ch18Mostafa AbdelalimNo ratings yet
- Control Engineering Prof. S. D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 18Document19 pagesControl Engineering Prof. S. D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 18Mostafa AbdelalimNo ratings yet
- Lecture 2Document24 pagesLecture 2psunmoorthyNo ratings yet
- FESTO Hydraulics CourseDocument236 pagesFESTO Hydraulics Coursemadmax2222100% (17)
- Antenna Azimuth Position Control System VerificationDocument15 pagesAntenna Azimuth Position Control System VerificationAbid AnuarNo ratings yet
- Introduction To Control Systems PDFDocument57 pagesIntroduction To Control Systems PDFMostafa Abdelalim100% (1)
- How Laminar Flow Element Flowmeters WorkDocument1 pageHow Laminar Flow Element Flowmeters WorkMostafa AbdelalimNo ratings yet
- 152 ISPJE Vol. 2640Document9 pages152 ISPJE Vol. 2640Mostafa AbdelalimNo ratings yet
- Chiller Water System: Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi VVVVDocument11 pagesChiller Water System: Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi Ý ¿SSö Eìè Ãi VVVVMostafa AbdelalimNo ratings yet
- 03 The Miracle of The Human BrainDocument6 pages03 The Miracle of The Human BrainAbhijeet SavantNo ratings yet
- Crime and Social Media (Faizal)Document14 pagesCrime and Social Media (Faizal)Abdul RahimNo ratings yet
- Adult Language Learning Styles and Strategies in An Intensive Training SettingDocument21 pagesAdult Language Learning Styles and Strategies in An Intensive Training SettingOmar Al-ShourbajiNo ratings yet
- Effect of Word Sense Disambiguation On Neural Machine Translation A Case Study in KoreanDocument12 pagesEffect of Word Sense Disambiguation On Neural Machine Translation A Case Study in KoreanhemantNo ratings yet
- TP1 PDFDocument323 pagesTP1 PDFDragana ĆorićNo ratings yet
- Grammar Project #1Document2 pagesGrammar Project #1Aleksandra SidorovaNo ratings yet
- Reading - Unit 1 - RW1Document30 pagesReading - Unit 1 - RW1Thanh Ngo Thi ThanhNo ratings yet
- Materi 10 Passive Voice, Subjunctive, Corelative ConjunctionDocument6 pagesMateri 10 Passive Voice, Subjunctive, Corelative Conjunctionindri suprianiNo ratings yet
- Pavlov's Pussy Lenguage of LustDocument9 pagesPavlov's Pussy Lenguage of LustValpo Valparaiso100% (2)
- FTRC June 19Document31 pagesFTRC June 19KARISSA MARA CRISOSTOMO100% (1)
- Chapter 2 - The Morality of Human Acts and Moral Accountability - 0Document31 pagesChapter 2 - The Morality of Human Acts and Moral Accountability - 0Nathasha ValienteNo ratings yet
- DST in Psychology PDFDocument3 pagesDST in Psychology PDFwernsickleNo ratings yet
- Active and Passive Voice and Exercise 1 of Language BookletDocument3 pagesActive and Passive Voice and Exercise 1 of Language BookletEmily Wyatt-MinterNo ratings yet
- Diktat - Peti AmandmanDocument25 pagesDiktat - Peti AmandmanMarko SrdanovićNo ratings yet
- Name's: David Martínez Ureta Student Name's:: ReporteDocument3 pagesName's: David Martínez Ureta Student Name's:: ReporteLuz MorgaNo ratings yet
- 08 - Forward and Backward ChainingDocument12 pages08 - Forward and Backward ChainingAndrea DreaminNo ratings yet
- Atoyebi On The Syntax of Reflexives in YorubaDocument3 pagesAtoyebi On The Syntax of Reflexives in YorubaEsùgbamíWilsonÌrosòOgbèNo ratings yet
- Qualitative Market Research: An International Journal: Article InformationDocument32 pagesQualitative Market Research: An International Journal: Article InformationHung PhanNo ratings yet
- Slow TourismDocument16 pagesSlow Tourismsyawala sabrinaNo ratings yet
- Research AssignDocument2 pagesResearch AssignKit ViescaNo ratings yet
- Automod Key FeaturesDocument5 pagesAutomod Key Featuresfullkule0% (1)
- The Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusDocument6 pagesThe Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusJohn Lloyd TomacaNo ratings yet
- Week 6 - Interpersonal and Negotiation SkillsDocument25 pagesWeek 6 - Interpersonal and Negotiation SkillsIodanutzs UkNo ratings yet
- How To Approach To Case Study Type Questions and MCQsDocument4 pagesHow To Approach To Case Study Type Questions and MCQsKushang ShahNo ratings yet
- HebraicTongueRestored FabredolivetDocument850 pagesHebraicTongueRestored FabredolivetRā Åmma Åresh Bakau100% (1)
- Buying Behaviour of Mobile PhoneDocument7 pagesBuying Behaviour of Mobile PhoneHms SameerNo ratings yet
- Transactional Analysis in Contemporary Psychotherapy (Edited - Richard - G - Erskine)Document347 pagesTransactional Analysis in Contemporary Psychotherapy (Edited - Richard - G - Erskine)Josiah Hudson100% (1)
- Teaching Reflection-1Document2 pagesTeaching Reflection-1api-230344725100% (1)
- An Intro To Multimodal Texts: Writer/Designer: A Guide To Making Multimodal Projects (Chapter 1)Document15 pagesAn Intro To Multimodal Texts: Writer/Designer: A Guide To Making Multimodal Projects (Chapter 1)writingcenterNo ratings yet
- WHLP Eapp Mod 10Document2 pagesWHLP Eapp Mod 10Jezza LapigueraNo ratings yet