You might also like
- Power Systems Fault AnalysisDocument89 pagesPower Systems Fault AnalysisrameshsmeNo ratings yet
- Unit 4 Root Locus - DiagramsDocument11 pagesUnit 4 Root Locus - DiagramsrameshsmeNo ratings yet
- PSA Open Ended ProblemsDocument18 pagesPSA Open Ended ProblemsrameshsmeNo ratings yet
- STABILITY AND STATE SPACE DiagramsDocument19 pagesSTABILITY AND STATE SPACE DiagramsrameshsmeNo ratings yet
- Unit 4 PSA 6-4-2020Document38 pagesUnit 4 PSA 6-4-2020rameshsmeNo ratings yet
- Indian Power System (An Overview) : Presented By: Parvindar Chaudhary Deptt. of Electrical Engg. MONAD University HapurDocument23 pagesIndian Power System (An Overview) : Presented By: Parvindar Chaudhary Deptt. of Electrical Engg. MONAD University HapurrameshsmeNo ratings yet
- Problems in PSADocument12 pagesProblems in PSArameshsme100% (1)
- Unit 5 ReferenceDocument25 pagesUnit 5 ReferencerameshsmeNo ratings yet
- Unit 4 PSA 10-4-2020 & 11-04-2020Document13 pagesUnit 4 PSA 10-4-2020 & 11-04-2020rameshsmeNo ratings yet
- 10692-Article Text-15989-1-10-20200421 PDFDocument10 pages10692-Article Text-15989-1-10-20200421 PDFrameshsmeNo ratings yet
- Indian Power System (An Overview) : Presented By: Parvindar Chaudhary Deptt. of Electrical Engg. MONAD University HapurDocument23 pagesIndian Power System (An Overview) : Presented By: Parvindar Chaudhary Deptt. of Electrical Engg. MONAD University HapurrameshsmeNo ratings yet
- Digital Photo Album Speed, Scale and SpectrumDocument117 pagesDigital Photo Album Speed, Scale and SpectrumHardik SabbarwalNo ratings yet
- Unit 1 PDFDocument6 pagesUnit 1 PDFrameshsmeNo ratings yet
- Psoc L17 2 PDFDocument2 pagesPsoc L17 2 PDFrameshsmeNo ratings yet
- Design and Fabrication of Self Balancing Two-Wheeler Model Using GyroscopeDocument11 pagesDesign and Fabrication of Self Balancing Two-Wheeler Model Using GyroscoperameshsmeNo ratings yet
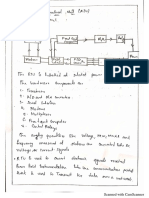
- Ans:) RTU One: Ansii)Document3 pagesAns:) RTU One: Ansii)rameshsmeNo ratings yet
- A New Literature Review of Automatic Generation Control in Deregulated Environment PDFDocument7 pagesA New Literature Review of Automatic Generation Control in Deregulated Environment PDFrameshsmeNo ratings yet
- Linear Quadratic Regulator (LQR) State Feedback Design: R T U R T XDocument10 pagesLinear Quadratic Regulator (LQR) State Feedback Design: R T U R T XrameshsmeNo ratings yet
- HoverboardDocument5 pagesHoverboardSuresh PrajapatiNo ratings yet
- A New Literature Review of Automatic Generation Control in Deregulated Environment PDFDocument7 pagesA New Literature Review of Automatic Generation Control in Deregulated Environment PDFrameshsmeNo ratings yet
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDocument41 pagesLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeNo ratings yet
- A Review On Various Self Balanacing MethodsDocument4 pagesA Review On Various Self Balanacing MethodsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Sustainability & Environmental Issues For Indian Industries Mandar ParasnisDocument23 pagesSustainability & Environmental Issues For Indian Industries Mandar ParasnisrameshsmeNo ratings yet
- 10692-Article Text-15989-1-10-20200421 PDFDocument10 pages10692-Article Text-15989-1-10-20200421 PDFrameshsmeNo ratings yet
- Tutorial VPPC 16 HEVDocument70 pagesTutorial VPPC 16 HEVrameshsmeNo ratings yet
- 1 s2.0 S2352146519301772 MainDocument5 pages1 s2.0 S2352146519301772 MainrameshsmeNo ratings yet
- 11ee915 Psoc PDFDocument2 pages11ee915 Psoc PDFrameshsmeNo ratings yet
- International Communications in Heat and Mass Transfer: Vivek Kumar, Jahar SarkarDocument9 pagesInternational Communications in Heat and Mass Transfer: Vivek Kumar, Jahar SarkarrameshsmeNo ratings yet
- ENEGY AUDIT-form-1Document3 pagesENEGY AUDIT-form-1rameshsmeNo ratings yet
- Hamid 2017 IOP Conf. Ser. Mater. Sci. Eng. 257 012067 PDFDocument8 pagesHamid 2017 IOP Conf. Ser. Mater. Sci. Eng. 257 012067 PDFrameshsmeNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- An Introduction To DC Generator Using Matlab/Simulink: Debabrata PalDocument4 pagesAn Introduction To DC Generator Using Matlab/Simulink: Debabrata PalMohammad H Al-QaisiNo ratings yet
- Observer-Based Monitoring of Heat ExchangersDocument10 pagesObserver-Based Monitoring of Heat ExchangersMiguel LópezNo ratings yet
- Deber Coeficientes Globales de La Transferencia de CalorDocument13 pagesDeber Coeficientes Globales de La Transferencia de CalorJuan Francisco JácomeNo ratings yet
- Design, Analysis and Fabrication of Split Braking SystemDocument6 pagesDesign, Analysis and Fabrication of Split Braking Systemhabib nawazNo ratings yet
- Unit7 Day9 CheckforunderstandingDocument21 pagesUnit7 Day9 Checkforunderstandingapi-261280967No ratings yet
- 2 Extracting Knowledge QuestionsDocument27 pages2 Extracting Knowledge QuestionsAzer AliyevNo ratings yet
- Moisture and Total Solids AnalysisDocument44 pagesMoisture and Total Solids AnalysisNicholas BoampongNo ratings yet
- What Are Stiffness Modifiers in EtabsDocument35 pagesWhat Are Stiffness Modifiers in EtabsHiren Desai50% (2)
- Models - Mph.heat Transient AxiDocument6 pagesModels - Mph.heat Transient AxiAnonymous sAmJfcVNo ratings yet
- Table 6-Peak Solar Heat Gain Thru Ordinary GlassDocument1 pageTable 6-Peak Solar Heat Gain Thru Ordinary GlassADsuperman100% (1)
- APEGBC Eng Syllabus MechanicalDocument22 pagesAPEGBC Eng Syllabus MechanicalbaljinderNo ratings yet
- 4 - Vectors and Tensors - Lesson4Document22 pages4 - Vectors and Tensors - Lesson4emmanuel FOYETNo ratings yet
- Metrix Px110 and Px120 Power Meter User ManualDocument21 pagesMetrix Px110 and Px120 Power Meter User ManualjcowNo ratings yet
- Construction and Trial Experiment of A Small Size Thermo-Acoustic Refrigeration SystemDocument6 pagesConstruction and Trial Experiment of A Small Size Thermo-Acoustic Refrigeration SystemijeteeditorNo ratings yet
- Experimental study of four-point bending test on CLT deep beamsDocument6 pagesExperimental study of four-point bending test on CLT deep beamsFergus GardnerNo ratings yet
- Methods of DehumidificationDocument4 pagesMethods of Dehumidificationprashant_mahitkar4532100% (3)
- 3-7 Fluids in Rigid-Body Motion: - We ObtainedDocument6 pages3-7 Fluids in Rigid-Body Motion: - We ObtainedAsmaa Ali El-AwadyNo ratings yet
- Apllied Electric Circuit Objective Question and AnswerDocument42 pagesApllied Electric Circuit Objective Question and AnswerGanesan KandasamyNo ratings yet
- Fyp Project For BrakesDocument28 pagesFyp Project For BrakesManojNo ratings yet
- Test Planner-Repeater Course - 2023-2024 - (Phase-03)Document2 pagesTest Planner-Repeater Course - 2023-2024 - (Phase-03)SbjNo ratings yet
- Low Angle XRDDocument11 pagesLow Angle XRDKoushik PonnuruNo ratings yet
- Literal Equations Name ProjectDocument4 pagesLiteral Equations Name Projectapi-297789948No ratings yet
- @structural Steel Design - A Practice Oriented ApproachDocument9 pages@structural Steel Design - A Practice Oriented ApproachFRANCISCO CUBA H.No ratings yet
- Design and Fabrication of Hand Water Pump Operated by A PendulumDocument6 pagesDesign and Fabrication of Hand Water Pump Operated by A PendulumAyyanrajNo ratings yet
- Course Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24Document27 pagesCourse Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24nabajyotimajhi2000No ratings yet
- Higher efficiency synchronous motors for industrial applicationsDocument6 pagesHigher efficiency synchronous motors for industrial applicationsAmirNo ratings yet
- IEEE 4 Node Test Feeder Revised Sept. 19, 2006Document9 pagesIEEE 4 Node Test Feeder Revised Sept. 19, 2006Town Obio EteteNo ratings yet
- ABB Motors Technical Data SheetDocument1 pageABB Motors Technical Data SheetAgung AfrizalNo ratings yet
- Becker 1987Document16 pagesBecker 1987Luis Fernando Vergaray AstupiñaNo ratings yet