You might also like
- Load CellDocument15 pagesLoad CellhasratNo ratings yet
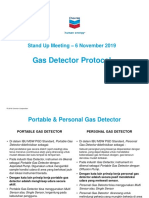
- STUM - Gas Detector ProtocolDocument8 pagesSTUM - Gas Detector ProtocolIestri Kusumah WardhaniNo ratings yet
- Kalibrasi Transmitter ThermocoupleDocument4 pagesKalibrasi Transmitter Thermocoupleaditya rahimNo ratings yet
- Makalah Kalibrasi IIDocument81 pagesMakalah Kalibrasi IIMadina AnnanisaNo ratings yet
- Pengoperasian Sisteam Air CondensateDocument4 pagesPengoperasian Sisteam Air CondensateoksaNo ratings yet
- Bagaimana Cara Memasang Rangkaian Otomatis Pompa Tanpa Pelampung?Document4 pagesBagaimana Cara Memasang Rangkaian Otomatis Pompa Tanpa Pelampung?hasianwipoNo ratings yet
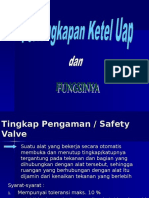
- Fungsi Appendages RevDocument36 pagesFungsi Appendages Revmardan100% (2)
- Sop Eng El002 Panel UtamaDocument8 pagesSop Eng El002 Panel UtamaAon100% (1)
- KalibrasiDocument5 pagesKalibrasiIndry RatuanakNo ratings yet
- Kalibrasi DimensiDocument21 pagesKalibrasi DimensiAgus Nur FitriantoNo ratings yet
- Penggerak Dan PositionerDocument31 pagesPenggerak Dan PositionerFifi LifiaNo ratings yet
- Gas Detector ModulDocument59 pagesGas Detector ModulArdi HardiantoNo ratings yet
- DeaeratorDocument10 pagesDeaeratorsyahril febriansyahNo ratings yet
- Teknik Kalibrasi MassaDocument44 pagesTeknik Kalibrasi MassaBLPKILNo ratings yet
- Kalibrasi TransmitterDocument8 pagesKalibrasi TransmitterAsmi NurlaelyNo ratings yet
- Penjadwalan Perawatan BoilerDocument3 pagesPenjadwalan Perawatan BoilerEly Nurlaily RumdanNo ratings yet
- Panduan Kalibrasi SLM - Rev1Document58 pagesPanduan Kalibrasi SLM - Rev1Febrianca KharismaNo ratings yet
- 4.1 Check List Riksa UJi K3 PemanfaatanDocument7 pages4.1 Check List Riksa UJi K3 PemanfaatanlisaindriNo ratings yet
- Manual Book Elektrikal (Panel)Document40 pagesManual Book Elektrikal (Panel)Isnanto AjaNo ratings yet
- Skema Sertifikasi Listrik Migas Teknisi Sistem DistribusiDocument8 pagesSkema Sertifikasi Listrik Migas Teknisi Sistem DistribusiLory MarcNo ratings yet
- Standar Pemeriksaan Dan Pengujian Pesawat Tenaga ProduksiDocument11 pagesStandar Pemeriksaan Dan Pengujian Pesawat Tenaga ProduksiAriani WidiawatiNo ratings yet
- Perawatan PlambingDocument109 pagesPerawatan PlambingSatrio Wityanto HutomoNo ratings yet
- Sistem DEH Steam TurbineDocument3 pagesSistem DEH Steam TurbineMahessa AlvaroNo ratings yet
- Instrumentasi 2Document106 pagesInstrumentasi 2Ghifa FirdausNo ratings yet
- PSV 031009Document45 pagesPSV 031009Jusril HidayatNo ratings yet
- Skema Proses PLTUDocument17 pagesSkema Proses PLTUdanielsinaga2651430% (1)
- ETSDocument12 pagesETSanggasNo ratings yet
- Ik Pressure TransmitterDocument5 pagesIk Pressure TransmitterLingga SuhadhaNo ratings yet
- Standart Operasional Deaerator Batang KumuDocument10 pagesStandart Operasional Deaerator Batang KumuJody SetiawanNo ratings yet
- Kalibrasi TekananDocument12 pagesKalibrasi Tekananantok09No ratings yet
- Komisioning PLTUDocument11 pagesKomisioning PLTUwin_mks32100% (1)
- Langkah Isi Dan Pembuangan FreonDocument4 pagesLangkah Isi Dan Pembuangan FreonElyas SNo ratings yet
- Sio BoilerDocument106 pagesSio BoilerTJ OlshopNo ratings yet
- JOB 5-Kebocoran FreonDocument3 pagesJOB 5-Kebocoran FreonGomgom PangaribuanNo ratings yet
- Skema Sertifikasi Instrumentasi IIIDocument8 pagesSkema Sertifikasi Instrumentasi IIIsujudNo ratings yet
- 4 Langkah Mengukur Grounding ListrikDocument2 pages4 Langkah Mengukur Grounding ListrikRifqyRizqullahR100% (1)
- Menentukan Range Differential Pressure Transmitter Untuk MengukurDocument3 pagesMenentukan Range Differential Pressure Transmitter Untuk MengukursugiantobarusNo ratings yet
- Modul Bahan Ajar TermodinamikaDocument36 pagesModul Bahan Ajar TermodinamikaEkoNo ratings yet
- DRFT Eliminator, Nozzle, Dan FanDocument4 pagesDRFT Eliminator, Nozzle, Dan FanLenywulandari AyundaNo ratings yet
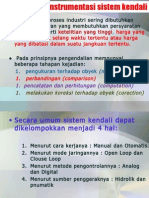
- 2.instrumentasi Sistem KendaliDocument15 pages2.instrumentasi Sistem KendaliMuhammad Taufik100% (1)
- Pengendalian Proses 3Document27 pagesPengendalian Proses 3DHILA AYUNINGTYASNo ratings yet
- Instruksi Kerja BoilerDocument2 pagesInstruksi Kerja BoilerroellyNo ratings yet
- Interlok Dan ProteksiDocument39 pagesInterlok Dan ProteksiImran MatondangNo ratings yet
- Instrumentasi Sistem KendaliDocument71 pagesInstrumentasi Sistem KendaliMuhamad Yusuf SupriadiNo ratings yet
- 1.1IK Pemasangan EXCITERDocument2 pages1.1IK Pemasangan EXCITERLeskat MelinNo ratings yet
- ElemenDocument8 pagesElemenmisnaNo ratings yet
- Rotating Equipment OverviewDocument58 pagesRotating Equipment OverviewWidharta Surya AlamNo ratings yet
- Bahan PresentasiDocument15 pagesBahan Presentasitkpb2013100% (1)
- D.2. Pengujian Meter Gas DiafragmaDocument13 pagesD.2. Pengujian Meter Gas DiafragmaEndriNo ratings yet
- Persyaratan K3 Pemeriksaan Dan Pengujian Terhadap InstalasiDocument54 pagesPersyaratan K3 Pemeriksaan Dan Pengujian Terhadap InstalasiTumpal SimatupangNo ratings yet
- TubeDocument36 pagesTubeAhmad IbrahimNo ratings yet
- Soal Water DistillerDocument4 pagesSoal Water DistillerabdulNo ratings yet
- Kalibrasi DP TransmitterDocument7 pagesKalibrasi DP Transmittersapu11jagat5855No ratings yet
- Kalibrasi TekananDocument4 pagesKalibrasi TekananNita ApriliyaniNo ratings yet
- Tugas Inspeksi BoilerDocument20 pagesTugas Inspeksi Boilersulaiman fikranNo ratings yet
- KD 3.1. SPE - Dasar Sistem Kendali (Control)Document18 pagesKD 3.1. SPE - Dasar Sistem Kendali (Control)Shopee JancokNo ratings yet
- Prinsip Dasar Sistem KontrolDocument34 pagesPrinsip Dasar Sistem KontrolMuhammad RahmandaniNo ratings yet
- KD 3.13 Dasar Kontrol SederhanaDocument28 pagesKD 3.13 Dasar Kontrol SederhanaPanji AgungNo ratings yet
- Bahan Ajar Teknik Instrumentasi Kilang Bab II - Sistem Kontrol ProsesDocument19 pagesBahan Ajar Teknik Instrumentasi Kilang Bab II - Sistem Kontrol Prosesdimas100% (1)
- Pengertian Dasar Sistem KontrolDocument7 pagesPengertian Dasar Sistem Kontrolnely tandiNo ratings yet
- Surat SosialisasiDocument3 pagesSurat SosialisasiMuhammad Akbar HariyonoNo ratings yet
- Surat LPFK 1Document2 pagesSurat LPFK 1Muhammad Akbar HariyonoNo ratings yet
- Data Rumah Sakit ReportDocument184 pagesData Rumah Sakit ReportMuhammad Akbar HariyonoNo ratings yet
- BAB 3 ErsyaDocument6 pagesBAB 3 ErsyaMuhammad Akbar HariyonoNo ratings yet
- UTS Sistem InstrumentasiDocument19 pagesUTS Sistem InstrumentasiMuhammad Akbar HariyonoNo ratings yet
- Cover Makalah Manajemen Energi Listrik UTSDocument5 pagesCover Makalah Manajemen Energi Listrik UTSMuhammad Akbar HariyonoNo ratings yet
- Bab IiDocument8 pagesBab IiMuhammad Akbar HariyonoNo ratings yet
- Dasar Konversi EnergiDocument34 pagesDasar Konversi EnergiMuhammad Akbar HariyonoNo ratings yet
- Penyimpanan EnergiDocument36 pagesPenyimpanan EnergiTaufikSavalasNo ratings yet
- RPS Energy Terbarukan S2 MTE 2017Document5 pagesRPS Energy Terbarukan S2 MTE 2017Muhammad Akbar Hariyono100% (1)
- Absen SosialisasiDocument2 pagesAbsen SosialisasiMuhammad Akbar HariyonoNo ratings yet
- TRANSMITTER CONVERTER Dan Instrument Signal Arief 2017Document47 pagesTRANSMITTER CONVERTER Dan Instrument Signal Arief 2017Muhammad Akbar HariyonoNo ratings yet
- 08 Energi Terbarukan Solar EnergyDocument7 pages08 Energi Terbarukan Solar EnergyMuhammad Akbar HariyonoNo ratings yet
- Audit Energi Di IndustriDocument100 pagesAudit Energi Di IndustriMuhammad Akbar Hariyono100% (1)
- Audit Energi Di IndustriDocument100 pagesAudit Energi Di IndustriMuhammad Akbar Hariyono100% (1)
- Statistik Daerah Provinsi Kalimantan Selatan 2017Document40 pagesStatistik Daerah Provinsi Kalimantan Selatan 2017Muhammad Akbar Hariyono50% (2)