You might also like
- Motores AC SíncronosDocument17 pagesMotores AC SíncronosebertonpoliNo ratings yet
- Proteção e comando de motores elétricosDocument95 pagesProteção e comando de motores elétricosroddiasdrNo ratings yet
- 3.a Aula - N6CV2 - Descrição Física Das Máquinas ElétricasDocument37 pages3.a Aula - N6CV2 - Descrição Física Das Máquinas ElétricasDanillo FerreiraNo ratings yet
- Mit - Motor de Indução TrifásicoDocument32 pagesMit - Motor de Indução TrifásicoEfi RenanNo ratings yet
- 0 - Princípio de Funcionamento M. AssíncronoDocument51 pages0 - Princípio de Funcionamento M. Assíncronocb.bispo16No ratings yet
- Aula 03 - Máquinas Assíncronas de Indução TrifásicasDocument51 pagesAula 03 - Máquinas Assíncronas de Indução TrifásicasanjgarNo ratings yet
- Ge Motores SincronosDocument8 pagesGe Motores Sincronosjaneiro2009No ratings yet
- Motores TrifásicosDocument11 pagesMotores Trifásicoswagner machado de moraesNo ratings yet
- Tipos de Motores ElétricosDocument18 pagesTipos de Motores Elétricosanjo13100% (1)
- 1 Motores Elétricos TrifásicosDocument7 pages1 Motores Elétricos TrifásicosQueirós Van-dúnenNo ratings yet
- Maquinas Indutivas ResumoDocument7 pagesMaquinas Indutivas ResumoCaio FicheNo ratings yet
- Motores Elétricos Síncronos e AssíncronosDocument15 pagesMotores Elétricos Síncronos e AssíncronosScheila FurquimNo ratings yet
- Motores Electricos de Corrente AlternadaDocument13 pagesMotores Electricos de Corrente AlternadaCardoso CyprianoNo ratings yet
- Motor de PassoDocument15 pagesMotor de PassoRobson De Siqueira OggioniNo ratings yet
- Funcionamento do motor de corrente alternada e sistemas de partida eletromecânicaDocument52 pagesFuncionamento do motor de corrente alternada e sistemas de partida eletromecânicaGabriel Vasconcelos NogueiraNo ratings yet
- 2º Trabalho (Questionario) Prova - Thiago Naime 00108849Document4 pages2º Trabalho (Questionario) Prova - Thiago Naime 00108849Thiago NaimeNo ratings yet
- Aula14-MotoresAC-EEI CV3-RA65º 17 0Document13 pagesAula14-MotoresAC-EEI CV3-RA65º 17 0Filipe xirindaNo ratings yet
- EscorregamentoDocument26 pagesEscorregamentoJunior NaturaNo ratings yet
- Motores ElétricosDocument39 pagesMotores ElétricosHelder Nascimento100% (2)
- Motor SincronoDocument13 pagesMotor SincronoDábilla Adriana BehrendNo ratings yet
- RESUMO Motores ElétricosDocument34 pagesRESUMO Motores ElétricosLuís Felipe Schrir100% (1)
- Aula 5Document28 pagesAula 5Camila PereiraNo ratings yet
- Critérios de Atendimento A Motores Elétricos de Indução-Cpfl PDFDocument97 pagesCritérios de Atendimento A Motores Elétricos de Indução-Cpfl PDFmiranmnNo ratings yet
- Comandos elétricos motoresDocument51 pagesComandos elétricos motoresCristiano Rodrigues Alves100% (1)
- 1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoDocument14 pages1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoProf. Bryan CupelloNo ratings yet
- Motor de InduçãoDocument9 pagesMotor de InduçãoGuilherme Souza SantosNo ratings yet
- Apostila Manutenção EletricaDocument38 pagesApostila Manutenção EletricawellingtondiassNo ratings yet
- MAE - Motores Trifasicos de CA PDFDocument67 pagesMAE - Motores Trifasicos de CA PDFJorge LimaNo ratings yet
- Motor Elétrico CA - Quais Os Tipos e Como Especificar? - CitisystemsDocument21 pagesMotor Elétrico CA - Quais Os Tipos e Como Especificar? - CitisystemsRafaNo ratings yet
- Aula 1Document15 pagesAula 1Murillo FernandesNo ratings yet
- Partida Estrela Triângulo - QuestõesDocument7 pagesPartida Estrela Triângulo - QuestõesSaulo CâmaraNo ratings yet
- Motores elétricos: tipos, partidas e controle de potênciaDocument54 pagesMotores elétricos: tipos, partidas e controle de potênciaReginaldo CamposNo ratings yet
- Guia Do Eletricista PDFDocument192 pagesGuia Do Eletricista PDFKaio Berçan100% (2)
- Controle de VelocidadeDocument16 pagesControle de VelocidadeGleisonGomesNo ratings yet
- Motores AssincronosDocument5 pagesMotores Assincronosvqjmphgp7kNo ratings yet
- Relatório 02 - 03Document12 pagesRelatório 02 - 03Paloma Medeiros BaquerNo ratings yet
- Motores CC PDFDocument36 pagesMotores CC PDFClaudinha CristinaNo ratings yet
- Partida compensadora de motores de induçãoDocument27 pagesPartida compensadora de motores de induçãoAlberto Chicava SecoNo ratings yet
- Motores EletricosDocument94 pagesMotores EletricosMagno SilvaNo ratings yet
- PP JacksonDocument8 pagesPP JacksonFabrício Soares de OliveiraNo ratings yet
- Máquinas CC: Motores e GeradoresDocument89 pagesMáquinas CC: Motores e GeradoresJbprofessor BatistaNo ratings yet
- Motores de Indução Monofásico UniversalDocument34 pagesMotores de Indução Monofásico UniversalLucas PhabloNo ratings yet
- Motores Elétricos CADocument16 pagesMotores Elétricos CADeyvidNo ratings yet
- Aula 16 - Motores AssíncronosDocument23 pagesAula 16 - Motores AssíncronosDarlei André Gravina JúniorNo ratings yet
- Motores de PassoDocument11 pagesMotores de PassoWil WiltmarNo ratings yet
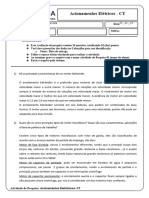
- Atividade de Pesquisa - Acionamentos Elétricos Wellington Da Silveira PereiraDocument5 pagesAtividade de Pesquisa - Acionamentos Elétricos Wellington Da Silveira PereiraApolianaNo ratings yet
- MAEL @Maquina Assincrona Eng EléctricaDocument21 pagesMAEL @Maquina Assincrona Eng EléctricaAntonio Paulo Vasco sementeNo ratings yet
- Controle de motores elétricosDocument18 pagesControle de motores elétricosDaicson FélixNo ratings yet
- Verificação Do Comportamento de Motor de Indução Trifásico A Partir Das Suas Condições Sobre Cargas.Document24 pagesVerificação Do Comportamento de Motor de Indução Trifásico A Partir Das Suas Condições Sobre Cargas.JoséLinharesNo ratings yet
- 10 - Motores de Corrente Alternada - Motor Assincrono (de Indução)Document73 pages10 - Motores de Corrente Alternada - Motor Assincrono (de Indução)Samuel FreitasNo ratings yet
- Motor Elétrico CADocument20 pagesMotor Elétrico CAVALBERLIMA100% (1)
- CA-CA Conversores para Motores de InduçãoDocument21 pagesCA-CA Conversores para Motores de Induçãod3ccoNo ratings yet
- Motores monofásicos CA - característicasDocument11 pagesMotores monofásicos CA - característicasMariana FigueiredoNo ratings yet
- Atividade de Pesquisa - Acionamentos ElétricosDocument5 pagesAtividade de Pesquisa - Acionamentos ElétricosleandrodasilveiraoliveiraNo ratings yet
- Lista de Exercicios de Circuito de Corrente AlternadaDocument2 pagesLista de Exercicios de Circuito de Corrente AlternadaThiago Henriques75% (4)
- VálvulasDocument29 pagesVálvulasLeandro Alves RezendeNo ratings yet
- Lista ExercíciosDocument7 pagesLista ExercíciosLeandro Alves Rezende0% (1)
- Simulados Mecanica Aula de SabadoDocument16 pagesSimulados Mecanica Aula de SabadoLeandro Alves RezendeNo ratings yet
- Lista ExercíciosDocument7 pagesLista ExercíciosLeandro Alves Rezende0% (1)
- 3a - Lista de Exercícios ArquimedesDocument3 pages3a - Lista de Exercícios ArquimedesLeandro Alves Rezende100% (1)
- Lista de Fisica IIDocument11 pagesLista de Fisica IILeandro Alves RezendeNo ratings yet
- Dez Perguntas de Filtros e - Água IndustrialDocument2 pagesDez Perguntas de Filtros e - Água IndustrialLeandro Alves RezendeNo ratings yet
- Materiais VMT-000001 Lista de ExercíciosDocument4 pagesMateriais VMT-000001 Lista de ExercíciosLeandro Alves Rezende0% (1)
- 1 Lista - Pressão, Densidade e Principio de StevinDocument1 page1 Lista - Pressão, Densidade e Principio de StevinLeandro Alves RezendeNo ratings yet
- P R TABELAS 04Document1 pageP R TABELAS 04Leandro Alves RezendeNo ratings yet
- Ficha de Trabalho - Distribuições Bidimensionais MACSDocument2 pagesFicha de Trabalho - Distribuições Bidimensionais MACSAna SilvaNo ratings yet
- Análise ergonômica de postos de trabalho em empresa de mediçõesDocument33 pagesAnálise ergonômica de postos de trabalho em empresa de mediçõesvictorNo ratings yet
- Unidade 4 - Condensadores EXEMPLO 8.2 Refrigerao IndustrialDocument11 pagesUnidade 4 - Condensadores EXEMPLO 8.2 Refrigerao IndustrialDaniel NóbregaNo ratings yet
- Cinética Decomp H2O2Document7 pagesCinética Decomp H2O2Mayke Cezar Wippel100% (1)
- Ficha de Avaliacao Questao Aula 2Document2 pagesFicha de Avaliacao Questao Aula 2cmeleiraNo ratings yet
- Nylon 11 Coatings Technical Data SheetDocument8 pagesNylon 11 Coatings Technical Data Sheetcleytonco2211No ratings yet
- Traçado de Estradas e Critérios de ProjetoDocument17 pagesTraçado de Estradas e Critérios de ProjetoI. AgostinhoNo ratings yet
- Vulcões: Erupções Explosivas e EfusivasDocument1 pageVulcões: Erupções Explosivas e EfusivasNatália CarneiroNo ratings yet
- Ponto de sela e valores extremos funçãoDocument10 pagesPonto de sela e valores extremos funçãoNaara Karolyne Morais PereiraNo ratings yet
- Geometria Lista 5by - AngulosDocument3 pagesGeometria Lista 5by - AngulosIago LimaNo ratings yet
- Isomeria PDFDocument46 pagesIsomeria PDFEmanuel MesquitaNo ratings yet
- Patent Es 2154Document236 pagesPatent Es 2154João SilvaNo ratings yet
- Pré-Projeto TCCDocument10 pagesPré-Projeto TCCRodrigo Sobral Backes CostaNo ratings yet
- Religador AR 1000 36kVDocument6 pagesReligador AR 1000 36kVJosé CarlosNo ratings yet
- A Forma e o Campo de Gravidade Da TerraDocument43 pagesA Forma e o Campo de Gravidade Da Terra糸井 ジョナタンNo ratings yet
- Avaliação de Matemática 8o AnoDocument4 pagesAvaliação de Matemática 8o AnoJuliete Firme Madalena75% (4)
- Complexidade Algoritmos de OrdenaçãoDocument6 pagesComplexidade Algoritmos de Ordenaçãoboaleitura13No ratings yet
- O Uso Da Neurociência Como Instrumento Do Marketing PolíticoDocument83 pagesO Uso Da Neurociência Como Instrumento Do Marketing PolíticoCarolina ZanquetaNo ratings yet
- NBR17505-7 - Arquivo para Impressão PDFDocument27 pagesNBR17505-7 - Arquivo para Impressão PDFAndre Soares de CastroNo ratings yet
- NBR 6484-SondagemDocument17 pagesNBR 6484-SondagemGustavo BarbosaNo ratings yet
- Lista Hidro 2Document4 pagesLista Hidro 2Flaviana Martins Conde OliveiraNo ratings yet
- P1 Analítica 2 UFRRJDocument6 pagesP1 Analítica 2 UFRRJLara Reis100% (1)
- Energia Potencial ElétricaDocument7 pagesEnergia Potencial ElétricaAna Luiza RodriguesNo ratings yet
- Cura Dos RelacionamentosDocument27 pagesCura Dos RelacionamentosCarla Martins100% (3)
- Conhecimento do subsolo para projetos de engenhariaDocument15 pagesConhecimento do subsolo para projetos de engenhariaVictor LaurenceNo ratings yet
- Modelos de sistemas dinâmicosDocument20 pagesModelos de sistemas dinâmicosRodolfo GuerreiroNo ratings yet
- 7 Atitudes Que Destroem A PaixãoDocument50 pages7 Atitudes Que Destroem A Paixãosandra reginaNo ratings yet
- Cabine de PinturaDocument11 pagesCabine de PinturaPriscila SantanaNo ratings yet
- Ligação Química HidrocarbonetosDocument12 pagesLigação Química HidrocarbonetosceciliaguiseNo ratings yet
- Alessandra Dasilva Pinelli SaracenoDocument93 pagesAlessandra Dasilva Pinelli SaracenoBruno HandemNo ratings yet