You might also like
- Kinematics of Machinery: Motion and AnalysisDocument29 pagesKinematics of Machinery: Motion and AnalysisShashank SinghNo ratings yet
- Intro Robot Kinematics 5Document25 pagesIntro Robot Kinematics 5Gnanesh PendliNo ratings yet
- Introduction To MechanismsDocument4 pagesIntroduction To MechanismsS Joe Patrick GnanarajNo ratings yet
- Kinematics of Machinery - Basics of MechanismDocument100 pagesKinematics of Machinery - Basics of MechanismAinnar KesavanNo ratings yet
- 1406 Advanced Kinematics and Dynamics of MachineryDocument13 pages1406 Advanced Kinematics and Dynamics of MachineryChiranjeev JainNo ratings yet
- Midterm MECE303 M 2 11 SampleDocument2 pagesMidterm MECE303 M 2 11 SamplePplegal PplegalpplegalNo ratings yet
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliDocument10 pagesROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- Transmission Angles and Four-Bar LinkagesDocument30 pagesTransmission Angles and Four-Bar LinkagesBivas Panigrahi0% (1)
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Design of a Multi-Fingered Gripper for Irregular ObjectsDocument8 pagesDesign of a Multi-Fingered Gripper for Irregular Objectsengr_faheemNo ratings yet
- BMMV3043 TutorialDocument4 pagesBMMV3043 TutorialKartik KrisnianNo ratings yet
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidNo ratings yet
- Elements of Mechanical Engg Syllabus (VTU)Document4 pagesElements of Mechanical Engg Syllabus (VTU)Prabhu SwamyNo ratings yet
- Vibration Midterm 2012Document2 pagesVibration Midterm 2012Aravind KumarNo ratings yet
- Robotics - Mumbai Univ - Sem 8 ElexDocument8 pagesRobotics - Mumbai Univ - Sem 8 Elex111ashwin0% (1)
- Four Bar LinkageDocument13 pagesFour Bar LinkageMBHladilekNo ratings yet
- Straight Line MechanismsDocument2 pagesStraight Line MechanismsكنوزخطابNo ratings yet
- 9A03502 Dynamics of MachineryDocument4 pages9A03502 Dynamics of MachinerysivabharathamurthyNo ratings yet
- Test SEM2 18-19 Questions PDFDocument2 pagesTest SEM2 18-19 Questions PDFAbdullah AlshihriNo ratings yet
- 27-11 Mechanical Vibration (ME)Document3 pages27-11 Mechanical Vibration (ME)Mahir MahmoodNo ratings yet
- Vibration: (BDA31103) Multi-Degree of FreedomDocument65 pagesVibration: (BDA31103) Multi-Degree of FreedomhildaNo ratings yet
- Chapter 1 PM CM SMDocument67 pagesChapter 1 PM CM SMZulhelmi MansorNo ratings yet
- Vtu Kinematics of Machines Module - 1 NotesDocument64 pagesVtu Kinematics of Machines Module - 1 NotesAnonymous SLKWYHBoNo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- Information and Program: Robotics 1Document13 pagesInformation and Program: Robotics 1Bharath KumarNo ratings yet
- ROBOTICS TITLEDocument10 pagesROBOTICS TITLEmaverickhydronNo ratings yet
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- DH Parameters PDFDocument122 pagesDH Parameters PDFyash523No ratings yet
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatDocument12 pagesMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhNo ratings yet
- Lecture 2-HypermeshDocument37 pagesLecture 2-Hypermeshkashish4u100% (1)
- Sudharsan Engineering College: UNIT I Fundamentals of RobotsDocument7 pagesSudharsan Engineering College: UNIT I Fundamentals of RobotsmetkarthikNo ratings yet
- Advanced Robotics SlidesDocument29 pagesAdvanced Robotics Slidesنام منNo ratings yet
- 06 Question Bank MV 2018 Unit V Vibration Measurement PDFDocument1 page06 Question Bank MV 2018 Unit V Vibration Measurement PDFNABIL HUSSAINNo ratings yet
- Basu-Fem Notes Me623Document210 pagesBasu-Fem Notes Me623Subhradeep ChatterjeeNo ratings yet
- Research Areas For Mechatronics EngineeringDocument2 pagesResearch Areas For Mechatronics EngineeringRohithGiridharan100% (1)
- Kinematics and Inverse Kinematics of A SCARA Robot: TopicsDocument10 pagesKinematics and Inverse Kinematics of A SCARA Robot: TopicsanujagrajNo ratings yet
- Jacobians-Differential KinematicsDocument62 pagesJacobians-Differential KinematicsChay Tick FeiNo ratings yet
- Kinematics Lab Manual GuideDocument18 pagesKinematics Lab Manual Guideshailendra_236No ratings yet
- Multi-DOF VibrationsDocument23 pagesMulti-DOF VibrationsHani BanatNo ratings yet
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- Selvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsDocument30 pagesSelvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsVijayan GopalsamyNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- Kinematic Synthesis of MechanismsDocument25 pagesKinematic Synthesis of MechanismsHarshan Arumugam75% (4)
- Mechanical Vibration 2 Marks QuestionsDocument5 pagesMechanical Vibration 2 Marks Questionsakvssakthivel100% (1)
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- Humanoid robot overviewDocument16 pagesHumanoid robot overviewShubham PundirNo ratings yet
- Chapter 3: Shell Meshing: Checking and Editing MeshDocument12 pagesChapter 3: Shell Meshing: Checking and Editing Meshmadhan24aeroNo ratings yet
- Kinematics of Machinery - Unit IDocument68 pagesKinematics of Machinery - Unit I20M226 - K V A SHREE VYBHAVNo ratings yet
- 080 Manipulator Trajectory PlanningDocument23 pages080 Manipulator Trajectory PlanningJohan RojasNo ratings yet
- Anatomy of Industrial RobotsDocument3 pagesAnatomy of Industrial RobotstechfiNo ratings yet
- Balancing of Reciprocating MassesDocument43 pagesBalancing of Reciprocating MassesNAVEENNo ratings yet
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Walking Trajectory Control of A Biped RobotDocument18 pagesWalking Trajectory Control of A Biped RobotBogdan PopNo ratings yet
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDocument30 pagesAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Notes-Unit-1 - 1d Kinematics StudentDocument12 pagesNotes-Unit-1 - 1d Kinematics StudenttrucksrcoolNo ratings yet
- Unit 1Document44 pagesUnit 1Prabal SinghNo ratings yet
- Mechanism 69869Document28 pagesMechanism 69869Abi DemNo ratings yet
- Simple MechanismDocument15 pagesSimple MechanismPrabal SinghNo ratings yet
- Aim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryDocument6 pagesAim: - To Study Various Types of Links, Pairs, Chain and Mechanism, Inversion of Mechanism For TheoryAvinash RNo ratings yet
- Unit IDocument33 pagesUnit IThe sky BlueNo ratings yet
- BRYAN SCHWAB HARRY DODSON - ACCELERATED TESTING - A Practitioner's Guide To Accelerated and Reliability testing.-SAE SOC OF AUTOMOTIVE ENG (2021) PDFDocument252 pagesBRYAN SCHWAB HARRY DODSON - ACCELERATED TESTING - A Practitioner's Guide To Accelerated and Reliability testing.-SAE SOC OF AUTOMOTIVE ENG (2021) PDFErasmo Israel Garcia OchoaNo ratings yet
- Isuzu NPR - NPR HD - NQR Commercial Truck Tiltmaster Service Manual Supplement 2003Document215 pagesIsuzu NPR - NPR HD - NQR Commercial Truck Tiltmaster Service Manual Supplement 2003Erasmo Israel Garcia Ochoa100% (4)
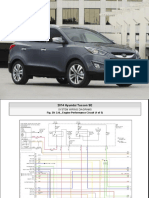
- Hyundai Tucson DIAGRAMA ELECTRICO PDFDocument6 pagesHyundai Tucson DIAGRAMA ELECTRICO PDFErasmo Israel Garcia Ochoa100% (6)
- 2011 Chevrolet Cruze LT Diagramas Electricos LibroDocument78 pages2011 Chevrolet Cruze LT Diagramas Electricos LibroJhonny Torralba78% (18)
- 2007 Ranger Vehicle Security8Document1 page2007 Ranger Vehicle Security8Erasmo Israel Garcia OchoaNo ratings yet
- A Scope For The Research and Development Activities On Electric Vehicle Technology in Pune City PDFDocument8 pagesA Scope For The Research and Development Activities On Electric Vehicle Technology in Pune City PDFErasmo Israel Garcia OchoaNo ratings yet
- Controlled Direct Injection System OverviewDocument56 pagesControlled Direct Injection System OverviewErasmo Israel Garcia OchoaNo ratings yet
- Immobilizer System Operation: Ford Ranger Security SystemDocument1 pageImmobilizer System Operation: Ford Ranger Security SystemErasmo Israel Garcia OchoaNo ratings yet
- Ford Ranger Vehicle Security System GuideDocument1 pageFord Ranger Vehicle Security System GuideErasmo Israel Garcia OchoaNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- Hybrid Auxiliary and High-Voltage BatteriesDocument58 pagesHybrid Auxiliary and High-Voltage BatteriesErasmo Israel Garcia Ochoa100% (1)
- Hybrid Auxiliary and High-Voltage BatteriesDocument58 pagesHybrid Auxiliary and High-Voltage BatteriesErasmo Israel Garcia Ochoa100% (1)
- The Effect of Nozzle Geometry Over The Evaporative Spray Formation PDFDocument16 pagesThe Effect of Nozzle Geometry Over The Evaporative Spray Formation PDFErasmo Israel Garcia OchoaNo ratings yet
- Simulation of Flow Field Manifold For PEM Fuel CellDocument8 pagesSimulation of Flow Field Manifold For PEM Fuel CellErasmo Israel Garcia OchoaNo ratings yet
- Reliability Prediction of The Fatigue Life of A Crankshaft PDFDocument4 pagesReliability Prediction of The Fatigue Life of A Crankshaft PDFErasmo Israel Garcia OchoaNo ratings yet
- Reliability Prediction of The Fatigue Life of A Crankshaft PDFDocument4 pagesReliability Prediction of The Fatigue Life of A Crankshaft PDFErasmo Israel Garcia OchoaNo ratings yet
- Bond Graph Modeling of Automotive Transmissions and DrivelinesDocument6 pagesBond Graph Modeling of Automotive Transmissions and DrivelinesBen FahNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- E Product Brochure Gasoline Direct Injection PDFDocument41 pagesE Product Brochure Gasoline Direct Injection PDFCatalin VisoschiNo ratings yet
- Pinout Tablero Haval m4Document1 pagePinout Tablero Haval m4Erasmo Israel Garcia OchoaNo ratings yet
- Controlled Direct Injection System OverviewDocument56 pagesControlled Direct Injection System OverviewErasmo Israel Garcia OchoaNo ratings yet
- Pinout at Haval M4 PDFDocument4 pagesPinout at Haval M4 PDFErasmo Israel Garcia OchoaNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- 1073 01 Wai A5 Te ML Wai1000 Operating InstructionsDocument104 pages1073 01 Wai A5 Te ML Wai1000 Operating InstructionsErasmo Israel Garcia Ochoa100% (1)
- ECM Terminal Layout and Reference ValuesDocument8 pagesECM Terminal Layout and Reference ValuesNelson Cacahuate PowerDanceeNo ratings yet
- Variable Camshaft Timing - Variable Valve TimingDocument85 pagesVariable Camshaft Timing - Variable Valve TiminglibertyplusNo ratings yet
- Pinout Tablero Haval m4Document1 pagePinout Tablero Haval m4Erasmo Israel Garcia OchoaNo ratings yet
- Pinout at Haval M4 PDFDocument4 pagesPinout at Haval M4 PDFErasmo Israel Garcia OchoaNo ratings yet
- NISSAN Urvan Gasolina 2008 Al 2014 PDFDocument47 pagesNISSAN Urvan Gasolina 2008 Al 2014 PDFErasmo Israel Garcia OchoaNo ratings yet
- Aggregate Planning (Written Report)Document15 pagesAggregate Planning (Written Report)bhebheko06No ratings yet
- Acroloc Machining Center BrochureDocument4 pagesAcroloc Machining Center Brochureswooshcmk100% (1)
- Automated packaging machine PLC controls small conveyor systemDocument8 pagesAutomated packaging machine PLC controls small conveyor systemMustapha ELMOUINENo ratings yet
- Electrical Machines Lab Manual Geethanjali College EEE Experiments Procedures SafetyDocument50 pagesElectrical Machines Lab Manual Geethanjali College EEE Experiments Procedures SafetyRajKumarNo ratings yet
- Ep-25 Era PressDocument26 pagesEp-25 Era PressLeonardNo ratings yet
- Bervres - May 2013txt NotepadDocument77 pagesBervres - May 2013txt NotepadPramod KurugantiNo ratings yet
- EM2020 ProceedingsDocument555 pagesEM2020 ProceedingsAnaPaulaFranceschettoNo ratings yet
- Republic Act No. 8495 (Me Law) - Part 1Document115 pagesRepublic Act No. 8495 (Me Law) - Part 1Ray charles De Vera100% (1)
- Mechanical Engineering ReviewerDocument13 pagesMechanical Engineering ReviewerAllen Reyes100% (1)
- IJEAS0303030Document5 pagesIJEAS0303030erpublicationNo ratings yet
- Basic Data Viper40 15066 enDocument10 pagesBasic Data Viper40 15066 enArmando RiveraNo ratings yet
- Палетувальна XT 4505 Manual 1Document33 pagesПалетувальна XT 4505 Manual 1Viktor YavtushenkoNo ratings yet
- The Recent History of The Machine ToolDocument60 pagesThe Recent History of The Machine Toolsmhvaa939100% (1)
- 800 X ADocument16 pages800 X Abigsteve9088No ratings yet
- SKF Multilog On-Line SystemDocument293 pagesSKF Multilog On-Line SystemDuraisamy PanchatcharamNo ratings yet
- G-9 Phy Self Test Unit 5Document7 pagesG-9 Phy Self Test Unit 5Abebaw AbtyNo ratings yet
- AhmedabadDocument153 pagesAhmedabadsunilkumarchaudhary100% (2)
- W Brochure WR-Series 0316 EN PDFDocument68 pagesW Brochure WR-Series 0316 EN PDFsoeratno onoNo ratings yet
- CNC - Machines PresentationDocument31 pagesCNC - Machines PresentationSascha SchranzNo ratings yet
- Condor 36N - 46N - 60N - 92260Document157 pagesCondor 36N - 46N - 60N - 92260Jose Luis Huerta0% (1)
- Manual Atlas Copco Xas136Document38 pagesManual Atlas Copco Xas136Tamer Elsebaei EbarhimNo ratings yet
- OJT HandoutDocument19 pagesOJT HandoutChrusNo ratings yet
- Catalogo Rexroth Esferas TransferidorasDocument16 pagesCatalogo Rexroth Esferas TransferidorasalexandremalucelliNo ratings yet
- Examination Date and Syllabus - FTRA and FTPADocument9 pagesExamination Date and Syllabus - FTRA and FTPAsandeep sanNo ratings yet
- TSplus VT2 Vertical Transfer Unit 8981500315 Version2Document38 pagesTSplus VT2 Vertical Transfer Unit 8981500315 Version2Rui de LimaNo ratings yet
- Premier LW Fiber Optic Cable BlowerDocument64 pagesPremier LW Fiber Optic Cable BlowerComstar SupplyNo ratings yet
- Handbook M700V M70V Series - Ib1500928engd PDFDocument437 pagesHandbook M700V M70V Series - Ib1500928engd PDFpcabrerajrNo ratings yet
- Tree Climbing Robot The Problem and Its BackgroundDocument6 pagesTree Climbing Robot The Problem and Its BackgroundJoel BiscoNo ratings yet
- SICC AGRICULTURAL ENGINEERING M3 Converted AutosavedDocument44 pagesSICC AGRICULTURAL ENGINEERING M3 Converted AutosavedShanelle FuentesNo ratings yet