You might also like
- Brief Notes On Signals and Systems 7.2Document77 pagesBrief Notes On Signals and Systems 7.2Bhaskar Rao GopisettiNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Homework 1Document8 pagesHomework 1Yooncheul JeungNo ratings yet
- Equal Area Criterion 1.0 Development of Equal Area CriterionDocument33 pagesEqual Area Criterion 1.0 Development of Equal Area Criterionscrib_111No ratings yet
- Method of Moments: Topic 13Document9 pagesMethod of Moments: Topic 13Zeeshan AhmedNo ratings yet
- Lect 17 - Performance Parameters of Rectifier CircuitsDocument40 pagesLect 17 - Performance Parameters of Rectifier CircuitsShumaila AltafNo ratings yet
- Rectifier and FiltersDocument36 pagesRectifier and FiltersPankaj SinghNo ratings yet
- Digital Signal Processing NotesDocument12 pagesDigital Signal Processing NotesDanial ZamanNo ratings yet
- Introduction To Random Processes Handouts PDFDocument116 pagesIntroduction To Random Processes Handouts PDFshaan76No ratings yet
- Two Port Networks PPT 1 B TECH 3RDDocument32 pagesTwo Port Networks PPT 1 B TECH 3RDEuthecas KipkiruiNo ratings yet
- PRP NotesDocument10 pagesPRP NotesBharath JojoNo ratings yet
- Motor Starter NordDocument36 pagesMotor Starter NordEuojrNo ratings yet
- Quartus II Introduction-VHDLDocument38 pagesQuartus II Introduction-VHDLMarc FilbàNo ratings yet
- RTD BasicsDocument5 pagesRTD BasicsMourougapragash SubramanianNo ratings yet
- Multivariate Random VariablesDocument29 pagesMultivariate Random VariablesEdmond ZNo ratings yet
- Three Phase ControlledDocument9 pagesThree Phase ControlledSaif HassanNo ratings yet
- 308manual 5 03Document57 pages308manual 5 03basileiouspyrosNo ratings yet
- RZ1-K Power CableDocument5 pagesRZ1-K Power CablegarysNo ratings yet
- PV Module PDFDocument53 pagesPV Module PDFNur Asyiqin JamaluddinNo ratings yet
- Full-Wave Rectifier - VerstudDocument26 pagesFull-Wave Rectifier - VerstudLIEW HUI FANG UNIMAPNo ratings yet
- Power Electronics PPT by DeveshDocument34 pagesPower Electronics PPT by Deveshshadan alamNo ratings yet
- Half-Wave RectifierDocument21 pagesHalf-Wave RectifierMuhammad Anaz'sNo ratings yet
- Probability & Random Variable Cheat SheetDocument2 pagesProbability & Random Variable Cheat SheetadkinsblNo ratings yet
- Half-Wave RL Circuit With A Free-Wheeling DiodeDocument7 pagesHalf-Wave RL Circuit With A Free-Wheeling Diodehamza abdo mohamoud100% (2)
- Design Via Root LocusDocument53 pagesDesign Via Root LocusAhmed ShareefNo ratings yet
- 09 04 Second Order Derivatives PDFDocument19 pages09 04 Second Order Derivatives PDFSri DNo ratings yet
- DSP Exam 1 Solutions and Key InformationDocument108 pagesDSP Exam 1 Solutions and Key InformationManikaushikNo ratings yet
- Digital Signal ProcessingDocument7 pagesDigital Signal Processingind sh1No ratings yet
- Formula PQTDocument13 pagesFormula PQTசிவக்குமார் ஈஸ்வரன்No ratings yet
- COORDINATION TABLESDocument98 pagesCOORDINATION TABLESHoangNo ratings yet
- 2 - 3 - 4-Wire RTD MeasurementDocument9 pages2 - 3 - 4-Wire RTD MeasurementtotovasiNo ratings yet
- Laplace Transform-Signal ProcessingDocument41 pagesLaplace Transform-Signal ProcessingstanculeanuNo ratings yet
- MATH 2170: Table of Derivatives and IntegralsDocument5 pagesMATH 2170: Table of Derivatives and IntegralsspacejuyNo ratings yet
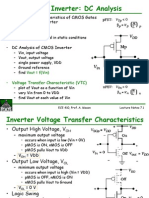
- CMOS Inverter: DC AnalysisDocument32 pagesCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- Motor Starter Ac Motor StartersDocument6 pagesMotor Starter Ac Motor StartersShukor Az100% (1)
- Qdoc - Tips Ece633f09hw2solutionsDocument13 pagesQdoc - Tips Ece633f09hw2solutionsTrần Trọng TiếnNo ratings yet
- Medidas Eroelectronic PDFDocument4 pagesMedidas Eroelectronic PDFJuan Diego CondeNo ratings yet
- EC1252-Signals and SystemsDocument22 pagesEC1252-Signals and Systemsvikassheoran04100% (2)
- EIEN307 ch2Document54 pagesEIEN307 ch2Munkhsukh100% (1)
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Solved Question Papers For Gate Mechanical EngineeringDocument16 pagesSolved Question Papers For Gate Mechanical EngineeringAsaduz ZamanNo ratings yet
- Sect2-3 PDFDocument10 pagesSect2-3 PDFBlaiseNo ratings yet
- Cheat Sheet Biomedical Instrumentation ExamDocument1 pageCheat Sheet Biomedical Instrumentation Examdeemz00% (1)
- Signals and SystemsDocument17 pagesSignals and SystemsSanthosh Vegeta Goku GNo ratings yet
- Half Wave Rectifiers With Resistive and Inductive LoadDocument5 pagesHalf Wave Rectifiers With Resistive and Inductive Loadluqman059No ratings yet
- Characteristics of ThermocoupleDocument6 pagesCharacteristics of ThermocouplekusumgdasNo ratings yet
- SolutionDocument80 pagesSolution김정훈100% (1)
- Nyquist Plot and Stability Criteria - GATE Study Material in PDFDocument7 pagesNyquist Plot and Stability Criteria - GATE Study Material in PDFnidhi tripathiNo ratings yet
- Modeling Dynamic SystemsDocument48 pagesModeling Dynamic SystemssepehrNo ratings yet
- Graph Theory PDFDocument20 pagesGraph Theory PDFNihar Kuchroo100% (1)
- Week 6 - Z-TransformDocument15 pagesWeek 6 - Z-TransformRalph Ian CaingcoyNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamNo ratings yet
- LabSheet Experiments - Giatutinhyeu14 - 2Document176 pagesLabSheet Experiments - Giatutinhyeu14 - 2Nhi OtNo ratings yet
- Cad Commands LibraryDocument11 pagesCad Commands LibraryAvdija HamzićNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T yJavier H PomaNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T ySadimul Hasan MehalNo ratings yet
- Convolution ExamplesDocument41 pagesConvolution ExamplesHarris BaigNo ratings yet
- Signals & Systems 3 (2019-2020)Document21 pagesSignals & Systems 3 (2019-2020)Mohammed Abdalla AliNo ratings yet
- 09 Z TransformDocument34 pages09 Z TransformBhaskarNo ratings yet
- 09 Z TransformDocument39 pages09 Z TransformBhaskarNo ratings yet
- 09 Z TransformDocument39 pages09 Z TransformBhaskarNo ratings yet
- Previous Year Question Paper (Electronics)Document16 pagesPrevious Year Question Paper (Electronics)BhaskarNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- ARM Interrupt ProcessingDocument33 pagesARM Interrupt Processinglovet essampongNo ratings yet
- The Hill Chart of A Francis Turbine Is Indicated in The Figure. The Turbine Is Operating With A HeadDocument4 pagesThe Hill Chart of A Francis Turbine Is Indicated in The Figure. The Turbine Is Operating With A HeadBorja PumaresNo ratings yet
- 4 (DC Ohmmeter)Document14 pages4 (DC Ohmmeter)Mohd Hafizat Ahmad ZikriNo ratings yet
- Distribution System ReliabilityDocument8 pagesDistribution System Reliabilityabera alemayehuNo ratings yet
- Pflex Sg002p en PDocument86 pagesPflex Sg002p en Phartman_mdNo ratings yet
- Service Manual A3300M ....Document59 pagesService Manual A3300M ....QooNo ratings yet
- Clock GatingDocument10 pagesClock Gatingpavanmk2501No ratings yet
- MDR-8000 7-8GHz DsDocument6 pagesMDR-8000 7-8GHz DsEhsan RohaniNo ratings yet
- Types CR, CRC, CRP and CRD Directional Overcurrent Relays: CautionDocument32 pagesTypes CR, CRC, CRP and CRD Directional Overcurrent Relays: CautionRida JavidNo ratings yet
- MSI Motherboard ManualDocument80 pagesMSI Motherboard ManualHamboneNo ratings yet
- LM629 Salida PWMDocument25 pagesLM629 Salida PWMLuis VarelaNo ratings yet
- Pattern-Reconfigurable Yagi-Uda Antenna Based On Liquid MetalDocument5 pagesPattern-Reconfigurable Yagi-Uda Antenna Based On Liquid MetalVarsha RengaNo ratings yet
- 7001 0340 11 - CPDocument3 pages7001 0340 11 - CPdodudaNo ratings yet
- Module 1Document54 pagesModule 1TALLAH CHOWHANNo ratings yet
- ABB SACE Emax DC Circuit BreakersDocument47 pagesABB SACE Emax DC Circuit BreakersragmuNo ratings yet
- 2018+ Ford Focus 1L - Wiring DiagramsDocument602 pages2018+ Ford Focus 1L - Wiring DiagramsHưng TrầnNo ratings yet
- s7300 Failsafe Signal Modules Hardware Manual en-US en-US PDFDocument372 pagess7300 Failsafe Signal Modules Hardware Manual en-US en-US PDFJimy MendozaNo ratings yet
- OTDR Report: Total Fiber InformationDocument1 pageOTDR Report: Total Fiber InformationFrancisco FloresNo ratings yet
- Thesis ProjectDocument55 pagesThesis Projectlulesh82% (17)
- Op AmpDocument42 pagesOp AmpJyotiSharmaNo ratings yet
- Gigalight GPP-85192-SRCDocument9 pagesGigalight GPP-85192-SRCNurul Iman DaulayNo ratings yet
- OLTC - Circulating CurrentDocument16 pagesOLTC - Circulating CurrentAsif MominNo ratings yet
- LTE Logical Channels (What Info is TransferredDocument13 pagesLTE Logical Channels (What Info is TransferredAnshul GuptaNo ratings yet
- Bridge Type Sensor Measurements PDFDocument3 pagesBridge Type Sensor Measurements PDFSuvankar SasmalNo ratings yet
- Motor Speed Sensor Module CircuitDocument13 pagesMotor Speed Sensor Module CircuitPratik ThosarNo ratings yet
- Passive Optical Network (Pon) : Different Types of PonsDocument4 pagesPassive Optical Network (Pon) : Different Types of PonsAnees Ur RehmanNo ratings yet
- Logic Gates QuestionsDocument14 pagesLogic Gates QuestionsDinMat0% (2)
- Manual BookDocument76 pagesManual BookLaluAlwanNo ratings yet
- Arris DCS 3600 User GuideDocument42 pagesArris DCS 3600 User GuideAnonymous GXeRp98TbFNo ratings yet
- 456 5 014206 VNQ660Document19 pages456 5 014206 VNQ660Sadegh SaeediNo ratings yet