You might also like
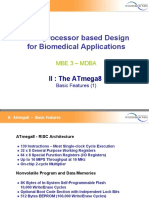
- Microprocessor Based Design For Biomedical Applications: Ii: The Atmega8Document50 pagesMicroprocessor Based Design For Biomedical Applications: Ii: The Atmega8Kanishk SilverFuryNo ratings yet
- Microprocessor Based Design For Biomedical Applications: Ii: The Atmega8Document50 pagesMicroprocessor Based Design For Biomedical Applications: Ii: The Atmega8himanshuNo ratings yet
- ATmega 1284 PDocument13 pagesATmega 1284 PWasang Juwi PracihnoNo ratings yet
- AtMega32 Data SheetDocument313 pagesAtMega32 Data SheetSumeet TiwanaNo ratings yet
- Atmega16 Data Sheet PDFDocument319 pagesAtmega16 Data Sheet PDFEduardo PasochoaNo ratings yet
- ATmega16A Datasheet SummaryDocument19 pagesATmega16A Datasheet SummaryalgiteanNo ratings yet
- ATmega1284P PDFDocument20 pagesATmega1284P PDFJessie PhelpsNo ratings yet
- ATMEGA32 16PU Atmel Datasheet 530750Document345 pagesATMEGA32 16PU Atmel Datasheet 530750Lakshay KachrooNo ratings yet
- ATmega32 SummaryDocument18 pagesATmega32 SummaryRajesh KumarNo ratings yet
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADocument18 pages8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022No ratings yet
- Atmega 16Document323 pagesAtmega 16suaradjusNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LDocument358 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LKhoerun Nisa SNo ratings yet
- 16f877a Pic ControllerDocument30 pages16f877a Pic Controlleryuvakirani100% (1)
- Atmega 644Document376 pagesAtmega 644binhminhmoiNo ratings yet
- 8051 ArchitectureDocument46 pages8051 ArchitectureSiddhasen PatilNo ratings yet
- ATmega16 PDFDocument359 pagesATmega16 PDFAndre PdNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LDocument24 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LKarthik KannanNo ratings yet
- Mudul Avr8535Document70 pagesMudul Avr8535Muhammad YassinNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LDocument349 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LIon CapcanariNo ratings yet
- Control Unit - 89C52: Introduction About Micro ControllerDocument20 pagesControl Unit - 89C52: Introduction About Micro ControllerSubhashini AruchamyNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LDocument21 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LbillionloveNo ratings yet
- COP87L88EB-RB DatasheetDocument72 pagesCOP87L88EB-RB DatasheetWarr SteelNo ratings yet
- At Mega 32Document346 pagesAt Mega 32Francisco GomezNo ratings yet
- Atmega 32 U 4Document26 pagesAtmega 32 U 4Bruno PalašekNo ratings yet
- Pengantar Atmega 16Document11 pagesPengantar Atmega 16Bramasto Adi NugrohoNo ratings yet
- Attiny 2313Document226 pagesAttiny 2313api-241773043No ratings yet
- Atmega 32 U 4Document433 pagesAtmega 32 U 4hummbumNo ratings yet
- Avr AtmegaDocument309 pagesAvr AtmegakcraussNo ratings yet
- Enhanced 8-Bit Microcontroller With 32 KB Flash Memory: AT89C51AC2 T89C51AC2Document121 pagesEnhanced 8-Bit Microcontroller With 32 KB Flash Memory: AT89C51AC2 T89C51AC2mukhi2006No ratings yet
- AT89S52Document19 pagesAT89S52Nikhith ReddyNo ratings yet
- Microcontroller Basics - PPSXDocument44 pagesMicrocontroller Basics - PPSXholaNo ratings yet
- Doc4127 PDFDocument121 pagesDoc4127 PDFLovelySinghNo ratings yet
- PIC MicrocontrollerDocument26 pagesPIC MicrocontrollerK.R.Raguram100% (1)
- M 168Document376 pagesM 168long_address_shortNo ratings yet
- Atmega 8Document3 pagesAtmega 8shraddhaNo ratings yet
- 02 AVR-Micro ControllerDocument59 pages02 AVR-Micro ControllerPriscillaNo ratings yet
- COP87L84BC 8-Bit CMOS OTP Microcontrollers With 16k Memory, Comparators, and CAN InterfaceDocument54 pagesCOP87L84BC 8-Bit CMOS OTP Microcontrollers With 16k Memory, Comparators, and CAN InterfaceWarr SteelNo ratings yet
- Atmel 2486 8 Bit Avr Microcontroller Atmega8 L DatasheetDocument331 pagesAtmel 2486 8 Bit Avr Microcontroller Atmega8 L DatasheetRolando IrrazabalNo ratings yet
- Arduino Uno r3 PDFDocument9 pagesArduino Uno r3 PDFAnonymous ytZsBOVNo ratings yet
- SSFDFDocument9 pagesSSFDFMaycol ParicahuaNo ratings yet
- Arduino Uno r3 DatasheetDocument9 pagesArduino Uno r3 DatasheetAndreea IlieNo ratings yet
- Arduino Uno r3Document9 pagesArduino Uno r3Danies Forensky IrawanNo ratings yet
- Arduino Uno r3 PDFDocument9 pagesArduino Uno r3 PDFDANIEL ALEJANDRO LEMUS RINCONNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Game Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7From EverandGame Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7No ratings yet
- Master System Architecture: Architecture of Consoles: A Practical Analysis, #15From EverandMaster System Architecture: Architecture of Consoles: A Practical Analysis, #15No ratings yet
- Datastructure MCQ 2 ImportantDocument15 pagesDatastructure MCQ 2 ImportantManikandanNo ratings yet
- Vibration Analysis For Hydraulic PumpDocument18 pagesVibration Analysis For Hydraulic PumpManikandanNo ratings yet
- Automatic Flower Pot Making MachineDocument36 pagesAutomatic Flower Pot Making MachineManikandan50% (2)
- N.Ajay Kumar: Career ObjectiveDocument2 pagesN.Ajay Kumar: Career ObjectiveManikandanNo ratings yet
- Rat in MazeDocument2 pagesRat in MazeManikandanNo ratings yet
- Binary Search Tree InsertionDocument2 pagesBinary Search Tree InsertionManikandanNo ratings yet
- N Queen ProblemDocument2 pagesN Queen ProblemManikandanNo ratings yet
- Snake and Ladder ProgramDocument2 pagesSnake and Ladder ProgramManikandanNo ratings yet
- ASME NQA-1 Quality Assurance Requirements For Nuclear Facility ApplicationsDocument2 pagesASME NQA-1 Quality Assurance Requirements For Nuclear Facility ApplicationsPrakhar KulshreshthaNo ratings yet
- 2023 Amlc Trainings User Manual (Participant)Document2 pages2023 Amlc Trainings User Manual (Participant)C JAYNo ratings yet
- QA Chapter5Document7 pagesQA Chapter5Ahmed GamalNo ratings yet
- Group 1 PC UpgradDocument23 pagesGroup 1 PC UpgradIbrahim AbdullahiNo ratings yet
- Emu8086 PDFDocument82 pagesEmu8086 PDFzero00067% (3)
- 2019 HSC Multimedia MGDocument7 pages2019 HSC Multimedia MGthrowawayacc4455No ratings yet
- Pan OsDocument952 pagesPan Osemail2suryaz0% (1)
- Syllabus M.Com 3Document8 pagesSyllabus M.Com 3Sagar BangreNo ratings yet
- Pentration Testing Report ShivDocument11 pagesPentration Testing Report ShivMAJ. VIKAS TYAGI DGR Batch 08No ratings yet
- Get Unlimited Downloads With A Membership: Aula 9 - Conectivos - Preposição E ConjunçãoDocument2 pagesGet Unlimited Downloads With A Membership: Aula 9 - Conectivos - Preposição E ConjunçãoFabExpertNo ratings yet
- John Margheret Resume 2021Document2 pagesJohn Margheret Resume 2021api-543422438No ratings yet
- When Technology and Humanity CrossDocument25 pagesWhen Technology and Humanity CrossJelyn Marie AndeoNo ratings yet
- Chapter 7 Class As A User Defined Data TypeDocument10 pagesChapter 7 Class As A User Defined Data TypeJoshNo ratings yet
- Load FileDocument85 pagesLoad FileNicolas EncisoNo ratings yet
- Semester: 8 Sem Subject: DOS Quiz BankDocument92 pagesSemester: 8 Sem Subject: DOS Quiz BankSAI RAMANNo ratings yet
- Warrior 8 Software FOM-61-150Document90 pagesWarrior 8 Software FOM-61-150Wualdir Vivas ChungaNo ratings yet
- Envirtech TCPIP-DCTU-01 Concentrator and Transceiver For SCADADocument2 pagesEnvirtech TCPIP-DCTU-01 Concentrator and Transceiver For SCADAFurio RuggieroNo ratings yet
- Fusa Catalog Web 2017Document116 pagesFusa Catalog Web 2017tariktunadNo ratings yet
- NetGuard - A Simple Way To Block Access To The IntDocument6 pagesNetGuard - A Simple Way To Block Access To The IntJason PatronaNo ratings yet
- Circuit Switching and Packet SwitchingDocument20 pagesCircuit Switching and Packet Switchingkamrulg100% (3)
- Role of Operating System PDF Computer ScienceDocument7 pagesRole of Operating System PDF Computer ScienceSayhan Fareedi Ahmed100% (1)
- About 39,000 Results (0.67 Seconds) : Novels (222) Uploads - ScribdDocument2 pagesAbout 39,000 Results (0.67 Seconds) : Novels (222) Uploads - ScribdsindhuNo ratings yet
- Cli GuideDocument120 pagesCli GuideJitesh JainNo ratings yet
- ASIC Layout - 2 Standard Cell FlowDocument25 pagesASIC Layout - 2 Standard Cell Flowdiva9jobsNo ratings yet
- Making Brain WavesDocument5 pagesMaking Brain WavesGemer Ann Tarlengco-DomondonNo ratings yet
- User's Guide: DO Qualification KitDocument74 pagesUser's Guide: DO Qualification KitBennyNo ratings yet
- Optimization of Airspace SectorizationDocument5 pagesOptimization of Airspace SectorizationferryNo ratings yet
- CP-UNR-4K4324-I: 32 Ch. 4K Network Video RecorderDocument5 pagesCP-UNR-4K4324-I: 32 Ch. 4K Network Video RecorderRAJENDRAN PLNo ratings yet
- Iso 14001-2015 ©Document44 pagesIso 14001-2015 ©tafouzelt100% (24)
- Massive Mimo Ahr (TDD) (5g Ran6.1 - Draft A)Document64 pagesMassive Mimo Ahr (TDD) (5g Ran6.1 - Draft A)VVLNo ratings yet