You might also like
- Hotel Control: Gestión económica práctica y análisis de las operaciones en un establecimiento de alojamiento turísticoFrom EverandHotel Control: Gestión económica práctica y análisis de las operaciones en un establecimiento de alojamiento turísticoRating: 5 out of 5 stars5/5 (4)
- Estadistico 2022Document15 pagesEstadistico 2022EDGARDONo ratings yet
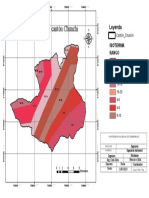
- Mapa de Isoterma Del Cantón Chunchi: LeyendaDocument1 pageMapa de Isoterma Del Cantón Chunchi: LeyendaFRANCISCO SALAZARNo ratings yet
- Reporte Diario de Soldadura Exalmar - EneroDocument6 pagesReporte Diario de Soldadura Exalmar - EneroRichitzoNo ratings yet
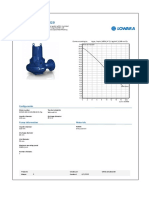
- Desague 1310S-65X.263.S64.220 PDFDocument5 pagesDesague 1310S-65X.263.S64.220 PDFSergio ZegarraNo ratings yet
- Desague 1310S 65X 263 S64 220 PDFDocument5 pagesDesague 1310S 65X 263 S64 220 PDFYhonny ValenzuelaNo ratings yet
- Teoria Del ProductorDocument5 pagesTeoria Del ProductorCristian Santiago Varon ZuluagaNo ratings yet
- Julio 3 Juan Anexo Unidad 1 GrupalDocument36 pagesJulio 3 Juan Anexo Unidad 1 Grupalhair IbañezNo ratings yet
- Diseño Mezclas AsfalticasDocument17 pagesDiseño Mezclas AsfalticasJose Antonio Valenzuela MujicaNo ratings yet
- CR 536 AfgjaehqqeDocument2 pagesCR 536 AfgjaehqqeDennisNo ratings yet
- Seguridad y Salud en El Trabajo Dirección Cosecha.: Noviembre 2022Document12 pagesSeguridad y Salud en El Trabajo Dirección Cosecha.: Noviembre 2022Fabian Moncayo menesesNo ratings yet
- Reporte de Indicadores 1Document33 pagesReporte de Indicadores 1Jefferson CorcueraNo ratings yet
- Anexo - 102003 Fundamentos de Economia Unidad 1-GrupalDocument33 pagesAnexo - 102003 Fundamentos de Economia Unidad 1-Grupalhair IbañezNo ratings yet
- 7 - Caso Pilas en VoladizoDocument62 pages7 - Caso Pilas en VoladizoEdisismo IngenieríaNo ratings yet
- 2015.00.00. MEX. Promexico. Analisis Sectorial de Farma Mexico IIDocument17 pages2015.00.00. MEX. Promexico. Analisis Sectorial de Farma Mexico IIMauricio CarvajalNo ratings yet
- 2015.00.00. MEX. Promexico. Analisis Sectorial de Farma MexicoDocument17 pages2015.00.00. MEX. Promexico. Analisis Sectorial de Farma MexicoMauricio CarvajalNo ratings yet
- Formatos Control TemperaturaDocument6 pagesFormatos Control TemperaturaLuis AlvaradoNo ratings yet
- Efectos de Encender El Equipo de EsterelizacionDocument1 pageEfectos de Encender El Equipo de EsterelizacionluisfelipequevedoavilaNo ratings yet
- Monografia 2Document13 pagesMonografia 2Treisy QMNo ratings yet
- Curva Bomba BVL6X6X10Document1 pageCurva Bomba BVL6X6X10ManuelMartinezNo ratings yet
- Hoja 3Document1 pageHoja 3Moises Conde CayoNo ratings yet
- Planilla Cálculo EnfierraduraDocument9 pagesPlanilla Cálculo Enfierradurafrancisco arratia venegasNo ratings yet
- Variables Que Afectan El Aterronamiento en Un Ingenio ColombianoDocument14 pagesVariables Que Afectan El Aterronamiento en Un Ingenio Colombianojhonantan PeñaNo ratings yet
- Maxter Soldadura InduscolDocument79 pagesMaxter Soldadura Induscolmecanico.ocmetsasNo ratings yet
- Base Procesos Junio 2023Document400 pagesBase Procesos Junio 2023jehimy arizmendiNo ratings yet
- Solución Teller Microeconomia #1Document18 pagesSolución Teller Microeconomia #1Elizabeth MontoyaNo ratings yet
- Matet 1 P 173Document14 pagesMatet 1 P 173Karoll Dayann Pulido PerézNo ratings yet
- Aspersor-Jardineria-Metalico 118004 Ficha PDFDocument2 pagesAspersor-Jardineria-Metalico 118004 Ficha PDFHoracio MendzitNo ratings yet
- Ejercicios - Clase 1 - Sección QDocument3 pagesEjercicios - Clase 1 - Sección QMari VicenteNo ratings yet
- Reporte Consumo de Sustancias Quimicas NoviembreDocument3 pagesReporte Consumo de Sustancias Quimicas NoviembreYESMIN ZELAYANo ratings yet
- 15EES0199Q.1Informe Uni Analisis Mat3°grado - Grupo (A)Document1 page15EES0199Q.1Informe Uni Analisis Mat3°grado - Grupo (A)Elizabeth AlmerayaNo ratings yet
- Datos PallpataDocument7 pagesDatos Pallpatafreddy quentaNo ratings yet
- Cotizacion ArjonaDocument1 pageCotizacion ArjonaRobe CarmonaNo ratings yet
- Actividad Practica Excel Basico L16Document4 pagesActividad Practica Excel Basico L16juan david cuadros mejiaNo ratings yet
- Unidad 6 - An Lisis de Regresi N y Correlaci NDocument35 pagesUnidad 6 - An Lisis de Regresi N y Correlaci Nchentecruz2No ratings yet
- Ejemplo Centro Comercial - RLDocument6 pagesEjemplo Centro Comercial - RLmilena gomezNo ratings yet
- Prueba de DuctibilidadDocument1 pagePrueba de DuctibilidadEmmanuel Alejandro Piña TapiaNo ratings yet
- BITACORA DE EVALUACIÓN RRHH y LiderazgoDocument6 pagesBITACORA DE EVALUACIÓN RRHH y LiderazgoAle RBNo ratings yet
- Matemáticas: Porcentaje de Aciertos Por ReactivoDocument1 pageMatemáticas: Porcentaje de Aciertos Por ReactivoKenia LhNo ratings yet
- 05 Aplicativo Evaluacion Costo Efectividad Con SensibilidadDocument10 pages05 Aplicativo Evaluacion Costo Efectividad Con SensibilidadoscarpapitoNo ratings yet
- Formato Junio 2021Document3 pagesFormato Junio 2021Claudia SantanaNo ratings yet
- Proyecciones 2022Document11 pagesProyecciones 2022Irene Narvaez CamachoNo ratings yet
- Tuberculosis 2022Document39 pagesTuberculosis 2022Jorge Enrique FernándezNo ratings yet
- PES LacteoDocument13 pagesPES LacteoKaterineNo ratings yet
- Diametro Total Victor Larco Herrera 2023Document1 pageDiametro Total Victor Larco Herrera 2023Joel JuárezNo ratings yet
- Matematicas FinancierasDocument2 pagesMatematicas FinancierassantiagoNo ratings yet
- OMAR CASTANEDA - Observatorio de Precios - OBS. DE PRECIOSDocument31 pagesOMAR CASTANEDA - Observatorio de Precios - OBS. DE PRECIOSsoperooo CityNo ratings yet
- TABLA - Taller Ley de Rendimientos Marginales DecrecientesDocument2 pagesTABLA - Taller Ley de Rendimientos Marginales DecrecientesAndrea Pulido VesgaNo ratings yet
- Trend Oil Analysis ReportDocument3 pagesTrend Oil Analysis ReportJuan Felipe Ayala IsaacsNo ratings yet
- Indicaciones Royalty 26.10.2022 v4Document27 pagesIndicaciones Royalty 26.10.2022 v4MaggySazoNo ratings yet
- PPT-Trabajo Parcial-G7Document14 pagesPPT-Trabajo Parcial-G7Joel Mio VillanuevaNo ratings yet
- Area Sembrada CaldasDocument1 pageArea Sembrada CaldasANGEL MARIA CARDONA GALLEGONo ratings yet
- Guías TécnicasDocument105 pagesGuías TécnicasRoger CanoNo ratings yet
- Código ISO de LimpiezaDocument3 pagesCódigo ISO de LimpiezaMichael Morales SozaNo ratings yet
- Fabricacion de Mallas MPDocument7 pagesFabricacion de Mallas MPBeatriz IturrizaNo ratings yet
- Ingenieria EconomicaDocument7 pagesIngenieria Economicajosegc1987No ratings yet
- Recibo Profe IvonneDocument3 pagesRecibo Profe IvonneVanessa Ruiz MulettNo ratings yet
- Proyecto OEE Tabletas HBI3Document14 pagesProyecto OEE Tabletas HBI3Alejandro cuellar murilloNo ratings yet
- Evidencia 3 Función de Producción y Costos-Equipo 4Document12 pagesEvidencia 3 Función de Producción y Costos-Equipo 4Armando RGNo ratings yet
- Indices de Seguridad y Salud OcupacionalDocument8 pagesIndices de Seguridad y Salud OcupacionalBel CRNo ratings yet
- Libro ESTATICA Problemas ResueltosDocument220 pagesLibro ESTATICA Problemas ResueltosFelipe López Garduza78% (116)
- Informe - Pasantia 2017 - Omar SegilDocument33 pagesInforme - Pasantia 2017 - Omar SegilOliver BurgosNo ratings yet
- Guia Refineria DGEE-1-z4646266zb5205a9xDocument122 pagesGuia Refineria DGEE-1-z4646266zb5205a9xGuillermoNo ratings yet
- Manual Tecnico PetroleroDocument39 pagesManual Tecnico PetroleroJosue Tarqui SoriaNo ratings yet
- Manual Tecnico PetroleroDocument39 pagesManual Tecnico PetroleroJosue Tarqui SoriaNo ratings yet
- Informe - Pasantia 2017 - Omar SegilDocument33 pagesInforme - Pasantia 2017 - Omar SegilOliver BurgosNo ratings yet
- Lab Final RefrigeracionDocument7 pagesLab Final RefrigeracionOliver BurgosNo ratings yet
- Cuarta Práctica Calificada de Cálculo IIDocument1 pageCuarta Práctica Calificada de Cálculo IIOliver BurgosNo ratings yet
- Kardex AlmacenDocument2 pagesKardex AlmacenSegundoLRuizTorresNo ratings yet
- Seminario Final de Cálculo 2Document2 pagesSeminario Final de Cálculo 2Oliver BurgosNo ratings yet
- Seminario Final de Cálculo 2Document2 pagesSeminario Final de Cálculo 2Oliver BurgosNo ratings yet
- Mant - Industrial InfoDocument14 pagesMant - Industrial InfoOliver BurgosNo ratings yet
- Seminario Final de Cálculo 2Document2 pagesSeminario Final de Cálculo 2Oliver BurgosNo ratings yet
- Cuarta Práctica Calificada de Cálculo IIDocument1 pageCuarta Práctica Calificada de Cálculo IIOliver BurgosNo ratings yet
- Informe CalderasDocument2 pagesInforme CalderasOliver BurgosNo ratings yet
- Mantenimiento PredictivoDocument9 pagesMantenimiento PredictivoOliver BurgosNo ratings yet
- Catalogo All Test Pro On Line II PDF 483 KBDocument4 pagesCatalogo All Test Pro On Line II PDF 483 KBOliver BurgosNo ratings yet
- 1Document7 pages1Gilmer J. Calla CharrezNo ratings yet
- Pasantia Tecsup EjemploDocument10 pagesPasantia Tecsup EjemploOliver BurgosNo ratings yet
- Lab. N2 Origami Diseño Mecanismo y PrototipoDocument18 pagesLab. N2 Origami Diseño Mecanismo y PrototipoOliver BurgosNo ratings yet
- Diseño de Proyecto de Innovación 1Document16 pagesDiseño de Proyecto de Innovación 1Oliver BurgosNo ratings yet
- Trabajo en EquipoDocument9 pagesTrabajo en EquipoOliver BurgosNo ratings yet
- Segunda Práctica Categorías GramaticalesDocument2 pagesSegunda Práctica Categorías GramaticalesOliver BurgosNo ratings yet
- LAB4PROCEDIMIENTOSDESERVICIODocument6 pagesLAB4PROCEDIMIENTOSDESERVICIOOliver BurgosNo ratings yet
- Actualizacion de Lista de Consumibles SF Modelo de InformeDocument44 pagesActualizacion de Lista de Consumibles SF Modelo de InformeOliver BurgosNo ratings yet
- Mant - Industrial InfoDocument14 pagesMant - Industrial InfoOliver BurgosNo ratings yet
- PDF Practicando Con El ManDocument1 pagePDF Practicando Con El ManOliver BurgosNo ratings yet
- Efecto (Tmse) : Universidad Nacional de IngenieriaDocument113 pagesEfecto (Tmse) : Universidad Nacional de IngenieriaOliver BurgosNo ratings yet
- 1 Estructura 2017Document49 pages1 Estructura 2017Oliver BurgosNo ratings yet
- Probabilidad 1Document2 pagesProbabilidad 1fdf100% (1)
- Criterios para La Selección de RodamientosDocument4 pagesCriterios para La Selección de RodamientosCarlos Alberto Martínez Escobar50% (2)
- RÚBRICA ANALÍTICA DE DESEMPEÑO-2medioDocument3 pagesRÚBRICA ANALÍTICA DE DESEMPEÑO-2medioRAÚL RAMÍREZ100% (1)
- Desarrollo Practica Brazo RoboticoDocument9 pagesDesarrollo Practica Brazo RoboticoArmando PachecoNo ratings yet
- Apuntes Mecánica.Document69 pagesApuntes Mecánica.Juan Carlos Sánchez EspañaNo ratings yet
- ÓpticaDocument16 pagesÓpticaAlonso Alejandro Flores ReyesNo ratings yet
- Plegadora Hidraulica mp3003 CNC 997 1407268418 PDFDocument70 pagesPlegadora Hidraulica mp3003 CNC 997 1407268418 PDFHugo G GuerreroNo ratings yet
- Superficies CuadraticasDocument11 pagesSuperficies CuadraticasFrankXYZNo ratings yet
- Sulfuros PDFDocument125 pagesSulfuros PDFGerardo PortalesNo ratings yet
- Resumen de Los VideosDocument3 pagesResumen de Los VideosMarcos CanoNo ratings yet
- Guia N°4 Reactivo Limitante ReendimientoDocument1 pageGuia N°4 Reactivo Limitante ReendimientoCony ZepedaNo ratings yet
- CisternaDocument11 pagesCisternaArturo Cervantes GarciaNo ratings yet
- Fisica 2 Pendulo FisicoDocument7 pagesFisica 2 Pendulo FisicoNeyza LopezNo ratings yet
- INDICADORES DE PH y CURVAS DE NEUTRALIZACIÓNDocument9 pagesINDICADORES DE PH y CURVAS DE NEUTRALIZACIÓNjuanNo ratings yet
- 1321 UsoDocument2 pages1321 UsoWitchfinder GeneralNo ratings yet
- Taller Tabla PeriodicaDocument2 pagesTaller Tabla PeriodicaClaudio OrdonezNo ratings yet
- Diseño de Poleas en VDocument12 pagesDiseño de Poleas en VCuautli García100% (3)
- Modulo 11Document8 pagesModulo 11Elizabeth Lopez HernandezNo ratings yet
- Baltuano Edwin Diseño Maquina Compactadora Latas Bebidas Aluminio AnexosDocument62 pagesBaltuano Edwin Diseño Maquina Compactadora Latas Bebidas Aluminio AnexosbrayanNo ratings yet
- Componentes Del Taladro de Perforacion y FabricantesDocument47 pagesComponentes Del Taladro de Perforacion y FabricantesAngel Velez CerinoNo ratings yet
- Movimiento Rectilíneo A Velocidad ConstanteDocument2 pagesMovimiento Rectilíneo A Velocidad ConstanteJosstyn TovarNo ratings yet
- Problemas Con RevoquesDocument7 pagesProblemas Con Revoquesosi32No ratings yet
- Misterios Sin Revelar AgarthaDocument9 pagesMisterios Sin Revelar AgarthaMauro BeltranNo ratings yet
- Elementos Estructurales de La Cámara de MáquinasDocument9 pagesElementos Estructurales de La Cámara de Máquinasanon_827635759No ratings yet
- Rosa de Los Vientos UltimoDocument23 pagesRosa de Los Vientos UltimoJuan Ariel Aspi ApazaNo ratings yet
- Plano y Producto CartesianoDocument8 pagesPlano y Producto CartesianoGabriela Ferrero0% (1)
- Practica MotorDocument7 pagesPractica MotorRoberto Gomez SanchezNo ratings yet
- Trabajo Colaborativo - Grupo 101 - Fase 4Document12 pagesTrabajo Colaborativo - Grupo 101 - Fase 4Anonymous pj9UhTv4QNo ratings yet
- Fundamentos de Puesta A Tierra PDFDocument8 pagesFundamentos de Puesta A Tierra PDFRoberto ZavaletaNo ratings yet