You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- VNMU-HCMUT Multiuser Detection Schemes for MTC-MC-CDMADocument14 pagesVNMU-HCMUT Multiuser Detection Schemes for MTC-MC-CDMAPham Duy ThongNo ratings yet
- Tables for Emission Spectrographic Analysis of Rare Earth ElementsFrom EverandTables for Emission Spectrographic Analysis of Rare Earth ElementsNo ratings yet
- Lecture 6 - Spectrum Estimation PDFDocument47 pagesLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- QM MechanicsDocument53 pagesQM MechanicsAK KumarNo ratings yet
- DSB SCDocument13 pagesDSB SCChandana priya SuthrayeNo ratings yet
- Noise Performnace AM N SSB EEE367Document14 pagesNoise Performnace AM N SSB EEE367SAWRAV DAS 1802039No ratings yet
- IED Modelling For Triple Frequency Capacitive Sheath: EEE 400: Project/ThesisDocument34 pagesIED Modelling For Triple Frequency Capacitive Sheath: EEE 400: Project/ThesisPurab RanjanNo ratings yet
- Transmission Line and WaveguideDocument37 pagesTransmission Line and Waveguidevishnupriyan100% (1)
- Double Side Band Suppressed Carrier: Professor Z GhassemlooyDocument13 pagesDouble Side Band Suppressed Carrier: Professor Z GhassemlooyUmaraDissaNo ratings yet
- MIMO FundamentalsDocument34 pagesMIMO FundamentalsAshwani KumarNo ratings yet
- NotesDocument21 pagesNotesmarquesNo ratings yet
- Sampling TheoremDocument92 pagesSampling TheoremvijaybabukoreboinaNo ratings yet
- Noise DSB N SSB EEE367Document12 pagesNoise DSB N SSB EEE367SAWRAV DAS 1802039No ratings yet
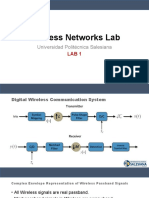
- Wireless Networks Lab: Universidad Politécnica SalesianaDocument22 pagesWireless Networks Lab: Universidad Politécnica SalesianaDiego Andrés CujiNo ratings yet
- Energy Density Spectrum Fourier AnalysisDocument9 pagesEnergy Density Spectrum Fourier AnalysisaavdsNo ratings yet
- Introduction To Radiowave Propagation: DR Costas ConstantinouDocument55 pagesIntroduction To Radiowave Propagation: DR Costas ConstantinouImran KhanNo ratings yet
- Optical Fiber Signals Propagation GuideDocument80 pagesOptical Fiber Signals Propagation Guidesrividya.lNo ratings yet
- Chapter 2 Optical FiberDocument132 pagesChapter 2 Optical FiberAnnan_Faridi_517No ratings yet
- 3F4 Power and Energy Spectral Density: Dr. I. J. WassellDocument12 pages3F4 Power and Energy Spectral Density: Dr. I. J. WassellNaeem Ali SajadNo ratings yet
- Kuliah 6b Bandpass ModulationDocument50 pagesKuliah 6b Bandpass ModulationBambang Arie SNo ratings yet
- Vibrations of Continuous SystemsDocument27 pagesVibrations of Continuous SystemslalbaghNo ratings yet
- SampleingDocument13 pagesSampleinganthony.onyishi.242680No ratings yet
- Osilasi HarmonisDocument62 pagesOsilasi HarmonisYudhistira YossaNo ratings yet
- 11 IIR Filter DesignDocument21 pages11 IIR Filter DesignAseem SharmaNo ratings yet
- Quadriphase Shift Keying (QPSKDocument6 pagesQuadriphase Shift Keying (QPSKYadhu N MNo ratings yet
- AAU/AAIT CENTER OF BIOMEDICAL ENGINEERING DIGITAL SIGNAL PROCESSINGDocument51 pagesAAU/AAIT CENTER OF BIOMEDICAL ENGINEERING DIGITAL SIGNAL PROCESSINGSurafel TadesseNo ratings yet
- Chapter 6 A P French PDFDocument20 pagesChapter 6 A P French PDFAman BhatiaNo ratings yet
- Lecture 3 Electromagnetic TransientsDocument50 pagesLecture 3 Electromagnetic TransientsManuelNo ratings yet
- MIMODocument15 pagesMIMOMitraNo ratings yet
- Small-Scale Fading I: Prof. Michael Tsai 2011/10/27Document27 pagesSmall-Scale Fading I: Prof. Michael Tsai 2011/10/27Yeroosan seenaaNo ratings yet
- Transmitters: - Information Measures - Vector Quantization - Delta Modulation - QamDocument31 pagesTransmitters: - Information Measures - Vector Quantization - Delta Modulation - Qamtesfalem seyoumNo ratings yet
- Outline: - Receivers (Chapter 5) (Week 3 and 4)Document31 pagesOutline: - Receivers (Chapter 5) (Week 3 and 4)HarshaNo ratings yet
- Power Systems Section 3 - HarmonicsDocument16 pagesPower Systems Section 3 - HarmonicsKhuram TabassomNo ratings yet
- MP QM - Part 2 - 2021Document36 pagesMP QM - Part 2 - 2021sama akramNo ratings yet
- L12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Document10 pagesL12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Hunter VerneNo ratings yet
- Demodulation Demodulation: - Coherent (Synchronous) Demodulation/detectionDocument38 pagesDemodulation Demodulation: - Coherent (Synchronous) Demodulation/detectionanasmos danielNo ratings yet
- DTFT DFT FS Ch8Document103 pagesDTFT DFT FS Ch8Pindi Prince Pindi100% (1)
- Spread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceDocument29 pagesSpread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceHimanshu AgrawalNo ratings yet
- Outline: - Receivers (Chapter 5) (Week 3 and 4)Document31 pagesOutline: - Receivers (Chapter 5) (Week 3 and 4)Sanaullah KhanNo ratings yet
- Deriving the Kalman FilterDocument8 pagesDeriving the Kalman FilterFrancisco López-HerreraNo ratings yet
- Transmission LinesDocument34 pagesTransmission LinesBasanta Kumar GautamNo ratings yet
- DSP II Math BackgroundDocument21 pagesDSP II Math BackgroundraviNo ratings yet
- Telecommunications Engineering Bandpass Modulation Demodulation TechniquesDocument36 pagesTelecommunications Engineering Bandpass Modulation Demodulation TechniquesBasit KhanNo ratings yet
- Formula Sheet (13 Pages) : CHE 314 - Heat Transfer, Final Exam (Fall 2018)Document13 pagesFormula Sheet (13 Pages) : CHE 314 - Heat Transfer, Final Exam (Fall 2018)Akib ImtihanNo ratings yet
- ME302 - Final Exam Formula SheetDocument2 pagesME302 - Final Exam Formula SheetAnil YildizNo ratings yet
- Nyquist Sampling Theorem and Signal ReconstructionDocument13 pagesNyquist Sampling Theorem and Signal ReconstructionSalmaanCadeXaajiNo ratings yet
- Signals and Systems ConvolutionDocument22 pagesSignals and Systems Convolution김지현No ratings yet
- Chapter3 Lect5Document16 pagesChapter3 Lect5mhamdi mounirNo ratings yet
- AdvDSP Lecture1Document43 pagesAdvDSP Lecture1Alireza DabiryNo ratings yet
- Line Codes RZ AND NRZDocument48 pagesLine Codes RZ AND NRZjigef19343No ratings yet
- Tema Nro. 3Document56 pagesTema Nro. 3Milagros LimNo ratings yet
- AC CircuitsDocument10 pagesAC CircuitsMarlon BlasaNo ratings yet
- Chap4 Lec1Document24 pagesChap4 Lec1Jane BNo ratings yet
- Multirate Signal ProcessingDocument39 pagesMultirate Signal ProcessingTô Minh ĐạtNo ratings yet
- Chapter 6 - Random SignalsDocument18 pagesChapter 6 - Random SignalsFrances DiazNo ratings yet
- Ds Lecture 5Document30 pagesDs Lecture 5Neeraj KumarNo ratings yet
- Lecture 5 - Kernel SAVAS1Document19 pagesLecture 5 - Kernel SAVAS1mushfique917No ratings yet
- Sampling of Continuous-Time SignalsDocument9 pagesSampling of Continuous-Time SignalsMOHAMMADNo ratings yet
- Alternating-Current Circuits: Physics 2212Document10 pagesAlternating-Current Circuits: Physics 2212deskaug1No ratings yet
- NR V2X Communication: Ji Min LeeDocument21 pagesNR V2X Communication: Ji Min LeeLastNightMixNo ratings yet
- Jimin Lee: Mobile Communications Lab Chung-Ang UniversityDocument1 pageJimin Lee: Mobile Communications Lab Chung-Ang UniversityLastNightMixNo ratings yet
- Jimin Lee: Mobile Communications Lab Chung-Ang UniversityDocument1 pageJimin Lee: Mobile Communications Lab Chung-Ang UniversityLastNightMixNo ratings yet
- Jimin Lee: Mobile Communications Lab Chung-Ang UniversityDocument1 pageJimin Lee: Mobile Communications Lab Chung-Ang UniversityLastNightMixNo ratings yet
- Aod Estimation With Dft-Based: Yeong Jun Kim Jimin LeeDocument7 pagesAod Estimation With Dft-Based: Yeong Jun Kim Jimin LeeLastNightMixNo ratings yet
- TSP158 Ardac Elite EP Host Manual V2.0Document37 pagesTSP158 Ardac Elite EP Host Manual V2.0cademoreNo ratings yet
- Stanway: Buying Options Click & CollectDocument3 pagesStanway: Buying Options Click & CollectPauloTavaresNo ratings yet
- Lane 3000Document2 pagesLane 3000guerramag1No ratings yet
- Akash ResumeDocument4 pagesAkash ResumeAkash MukherjeeNo ratings yet
- Information Security Management: Webster University Scott GrannemanDocument28 pagesInformation Security Management: Webster University Scott GrannemanAhmad LuthfiNo ratings yet
- Staad - Pro-V8i (Advanced) - Video TrainingDocument4 pagesStaad - Pro-V8i (Advanced) - Video TrainingSmartlearning TechnologyNo ratings yet
- Empowerment Technologies 1st Quarter ExamDocument2 pagesEmpowerment Technologies 1st Quarter ExamEi100% (1)
- AnyBody TutorialsDocument256 pagesAnyBody Tutorialsromulozg100% (1)
- Economic Geography Class NotesDocument33 pagesEconomic Geography Class NotesAryan RawatNo ratings yet
- What Did Sundar Pichai Do To CEO of Google - QuoraDocument6 pagesWhat Did Sundar Pichai Do To CEO of Google - QuoradadangkoeNo ratings yet
- SAP Community TagsDocument189 pagesSAP Community TagsmsandeeprajaNo ratings yet
- DICOM Printer Driver User ManualDocument13 pagesDICOM Printer Driver User ManualMuhamad RudiansyahNo ratings yet
- Fundamental 01 PDFDocument390 pagesFundamental 01 PDFJulioMedinaNo ratings yet
- Survey of Different Database SsoftwaresDocument17 pagesSurvey of Different Database Ssoftwareslocal man100% (1)
- IP Scanner FullDocument65 pagesIP Scanner FullNameNo ratings yet
- Expert - VMAX All Flash and VMAX3 Solutions 2.0: Certification DescriptionDocument4 pagesExpert - VMAX All Flash and VMAX3 Solutions 2.0: Certification DescriptionuthramNo ratings yet
- Reference Manual PDFDocument796 pagesReference Manual PDFValdemir Pereira100% (1)
- Elementary Data StructuresDocument66 pagesElementary Data StructuresAmbrose Ashok KumarNo ratings yet
- DCO Introduction - Pega PRPC v5.5Document10 pagesDCO Introduction - Pega PRPC v5.5Seheri Sowmya RajNo ratings yet
- Cellocator Programmer Manual PDFDocument71 pagesCellocator Programmer Manual PDFDaniCastor0% (1)
- Data Structure Lab AssignmentDocument38 pagesData Structure Lab AssignmentAbhratanu PalNo ratings yet
- List of Mechanical Engineering SoftwareDocument6 pagesList of Mechanical Engineering SoftwareMilanSomeshwaraNo ratings yet
- Oracle Rman BackupDocument5 pagesOracle Rman BackupSHAHID FAROOQNo ratings yet
- CV Mohammad Abrar's CAD ExperienceDocument2 pagesCV Mohammad Abrar's CAD ExperienceDavidNo ratings yet
- Grason-Stadler GSI Tympstar Manual V1 Rev CDocument285 pagesGrason-Stadler GSI Tympstar Manual V1 Rev CHabiB-BoyGuysNo ratings yet
- Technical CommunicationDocument6 pagesTechnical CommunicationRashmi SharmaNo ratings yet
- Bio Data: F2004034@bits-Pilani - Ac.inDocument5 pagesBio Data: F2004034@bits-Pilani - Ac.inSitikantha MallikNo ratings yet
- Tatuil TendenangDocument466 pagesTatuil TendenangJosias D TatontosNo ratings yet
- D. Null OperatorDocument49 pagesD. Null OperatorPlayIt All100% (2)
- Binary Search TreeDocument47 pagesBinary Search TreeAman Pushpinder BirdiNo ratings yet