You might also like
- 1.DC Motor Drives-Part1 Module 2 PDFDocument77 pages1.DC Motor Drives-Part1 Module 2 PDFsuvij ksNo ratings yet
- QSC RMX 850 RMX 1450 RMX 2450Document42 pagesQSC RMX 850 RMX 1450 RMX 2450Wilmer RamirezNo ratings yet
- DC MotorsDocument58 pagesDC MotorsSuhanNo ratings yet
- Diode Fault DetectorDocument29 pagesDiode Fault DetectormersiumNo ratings yet
- RectifierDocument5 pagesRectifierpreethiNo ratings yet
- 20kva Ups ManualDocument44 pages20kva Ups Manualbhanu_pratap_1663% (8)
- IM Speed Control Sep2023Document47 pagesIM Speed Control Sep2023Ashwini SinghNo ratings yet
- DC Motor Drives 2007Document48 pagesDC Motor Drives 2007stubborn002No ratings yet
- Brochure Marine Solutions 2015Document206 pagesBrochure Marine Solutions 2015ana0% (1)
- Emerson AC-DC ConverterDocument7 pagesEmerson AC-DC ConverterHuasuda Telecom0% (1)
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- Iec Codes PDFDocument257 pagesIec Codes PDFAkhil AnumandlaNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- Direct Torque Control of Induction MotorDocument37 pagesDirect Torque Control of Induction Motorpuria_rishabhNo ratings yet
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Servo MotorDocument16 pagesServo MotorMinh Tuan Tran100% (1)
- Closed-Loop Control of DC Drives With Controlled RectifierDocument49 pagesClosed-Loop Control of DC Drives With Controlled RectifierNithiya MaharajanNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument48 pagesClosed-Loop Control of DC Drives With Controlled Rectifierrida.hamza.muhammadNo ratings yet
- Closed Loop Control NewDocument47 pagesClosed Loop Control NewDr.K.Krishna Veni ProfessorNo ratings yet
- Lecture 9 Controlled Rectifier DC Drives-Closed Loop PDFDocument44 pagesLecture 9 Controlled Rectifier DC Drives-Closed Loop PDFmayajogiNo ratings yet
- Closed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BDocument36 pagesClosed-Loop Control of DC Drives With Controlled Rectifier: Chapter 3-BOsama TobasyNo ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- Closed-Loop Control of DC Drives With Controlled RectifierDocument40 pagesClosed-Loop Control of DC Drives With Controlled Rectifierathan19490% (1)
- ME2142-2 Lab MAnual Speed and Position ControlDocument9 pagesME2142-2 Lab MAnual Speed and Position ControlMohammad Taha IrfanNo ratings yet
- S-17 2030 Lab 2Document18 pagesS-17 2030 Lab 2शर्मिला बस्नेतNo ratings yet
- Chapter 4-Closed Loop DC Motor ControlDocument58 pagesChapter 4-Closed Loop DC Motor ControlBoughiout Islam abd elsammedNo ratings yet
- Modelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeDocument9 pagesModelling of DC Drive PI Controllers For The Speed and The Torque Loops by Using Matlab-SimscapeJames XgunNo ratings yet
- DavidDocument25 pagesDavidgtchsekharNo ratings yet
- REPS 12 PaperDocument7 pagesREPS 12 PaperbharathesecNo ratings yet
- Power Supply Control - DC - DC ConverterDocument32 pagesPower Supply Control - DC - DC Converterdivya k sNo ratings yet
- The Converter (Power Circuit) - 2. The D-STATCOM ControllerDocument42 pagesThe Converter (Power Circuit) - 2. The D-STATCOM ControllersiddhardhaNo ratings yet
- 1 Introduction To Electrical Drive SystemsDocument30 pages1 Introduction To Electrical Drive Systemsngobi25eddyNo ratings yet
- A High Performance Field-Oriented Control For A Switched Reluctance Motor DriveDocument6 pagesA High Performance Field-Oriented Control For A Switched Reluctance Motor Driveapi-26587237No ratings yet
- 03 Gt46ac HV SystemsDocument56 pages03 Gt46ac HV SystemsRafael Dutil LucianaNo ratings yet
- Adisu DC DCDocument20 pagesAdisu DC DCAdisuNo ratings yet
- Induction MachineDocument20 pagesInduction MachineUsama RaoNo ratings yet
- Vector ControlDocument5 pagesVector Controlapi-26587237No ratings yet
- Power Electronics - Chapter 8Document37 pagesPower Electronics - Chapter 8Mohamed ElgeziryNo ratings yet
- EPE3301 Power Electronics - 6. Control of Power Converters - Ss - LeeDocument45 pagesEPE3301 Power Electronics - 6. Control of Power Converters - Ss - LeeBryan KekNo ratings yet
- Unit V Design of Controllers For Drives: 3.1transfer Function For DC MotorDocument12 pagesUnit V Design of Controllers For Drives: 3.1transfer Function For DC Motormanoj kumarNo ratings yet
- Industrial Electronics CbcgsDocument28 pagesIndustrial Electronics Cbcgshadesg895No ratings yet
- G.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesDocument35 pagesG.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesAbhinav G. KhandekarNo ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Introduction Switched Capacitor CircuitsDocument18 pagesIntroduction Switched Capacitor CircuitsFarheenNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Control BLDC MotorsDocument5 pagesControl BLDC MotorsVasu SureshNo ratings yet
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocument41 pages5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNo ratings yet
- DCM SessoinDocument63 pagesDCM SessoinLakshmiNo ratings yet
- Lecture 0 Intro Power Electronics IDocument48 pagesLecture 0 Intro Power Electronics INisar AhmadNo ratings yet
- Motor Controls: Anibal T. de AlmeidaDocument42 pagesMotor Controls: Anibal T. de Almeidaabdallah hosinNo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- Transmission Line Power Transfer Capability Improvement, Case StudyDocument5 pagesTransmission Line Power Transfer Capability Improvement, Case StudyMuhammad NawalNo ratings yet
- Closed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueDocument4 pagesClosed Loop Speed Control of Permanent Magnet Synchronous Motor Drive Using SVPWM TechniqueLoyel RoseNo ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
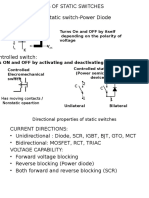
- Types of Static SwitchesDocument55 pagesTypes of Static SwitchesSubhash MurkuteNo ratings yet
- 445 AndradaDocument5 pages445 AndradaSung Ryoung LimNo ratings yet
- Ce 2 PDFDocument72 pagesCe 2 PDFDivya RajanNo ratings yet
- Commutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesDocument10 pagesCommutation-Torque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC DrivesmitulNo ratings yet
- Control of HVDC Converter SystemsDocument50 pagesControl of HVDC Converter SystemsBikash DasNo ratings yet
- NAWEA2015 NOVOA Final MODIFIEDDocument22 pagesNAWEA2015 NOVOA Final MODIFIEDjijo123408No ratings yet
- Ch8 - DC Motor DrivesDocument55 pagesCh8 - DC Motor DrivesWaleed RazzaqNo ratings yet
- 351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFDocument21 pages351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFفحرلرز دیمسNo ratings yet
- Ijett V53P221Document6 pagesIjett V53P221Rifky WahyudaNo ratings yet
- Performance Analysis of Fuzzy Logic Cont PDFDocument6 pagesPerformance Analysis of Fuzzy Logic Cont PDFMuruganandam MasilamaniNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Baseband TransmissionDocument41 pagesBaseband TransmissionakbarsohailshaikhNo ratings yet
- Bandpass TransmissionDocument6 pagesBandpass TransmissionakbarsohailshaikhNo ratings yet
- EC6001 Uw PDFDocument80 pagesEC6001 Uw PDFakbarsohailshaikhNo ratings yet
- JE Provisional List of CandidatesDocument182 pagesJE Provisional List of CandidatesakbarsohailshaikhNo ratings yet
- Advertisement No. 01 of 2019.: SE V Ce Commission SE 700Document2 pagesAdvertisement No. 01 of 2019.: SE V Ce Commission SE 700akbarsohailshaikhNo ratings yet
- Respiratory QuotientDocument11 pagesRespiratory QuotientakbarsohailshaikhNo ratings yet
- 6 - OMX37013 - Block Diagrams RTBDocument17 pages6 - OMX37013 - Block Diagrams RTBzakalyNo ratings yet
- BSM50GB120DN2Document4 pagesBSM50GB120DN2مجید تولاییNo ratings yet
- Converter, Inverter, Brake: SKIIP 12NAB126V1Document4 pagesConverter, Inverter, Brake: SKIIP 12NAB126V1Ahmad AlasadiNo ratings yet
- Test Report IEC 61558-2-16Document92 pagesTest Report IEC 61558-2-16Brijesh Kumar100% (1)
- FTA - Report - WPT 2014 PDFDocument61 pagesFTA - Report - WPT 2014 PDFJustin SitohangNo ratings yet
- Schematic Diagram - Sitepro - GE - Serie7Document18 pagesSchematic Diagram - Sitepro - GE - Serie7Khách Sạn Hoàng Phố100% (1)
- Pneumatic Controlled Ramming HolderDocument50 pagesPneumatic Controlled Ramming Holderraghul92No ratings yet
- Manual Guitar Rig 4 Portugues PDFDocument78 pagesManual Guitar Rig 4 Portugues PDFprgenilso100% (1)
- Implementation of DSP Based Sinusoidal Pulse Width Modulation For Three Phase InverterDocument9 pagesImplementation of DSP Based Sinusoidal Pulse Width Modulation For Three Phase InverterIJSTE100% (1)
- 9a02304-Basic Electrical & Electronics EngineeringDocument4 pages9a02304-Basic Electrical & Electronics Engineeringsivabharathamurthy0% (1)
- Electronic Cough Monitor: Musaab Hassan, Asiel Satti, Azza Hussien, Tarteel Tag El-DinDocument3 pagesElectronic Cough Monitor: Musaab Hassan, Asiel Satti, Azza Hussien, Tarteel Tag El-DinOcwich FrancisNo ratings yet
- Light ChaserDocument3 pagesLight ChaserVijay MirjeNo ratings yet
- 50 Watt Small Homemade InverterDocument25 pages50 Watt Small Homemade InverterMarlon CarinoNo ratings yet
- Time Allotted: 1hourfull Marks:30: HVDC TransmissionDocument1 pageTime Allotted: 1hourfull Marks:30: HVDC TransmissionGargi RoyNo ratings yet
- Bosch Terminal DesignationDocument7 pagesBosch Terminal DesignationFernando AguilarNo ratings yet
- Coils and Electronics: Catalog HY15-3502/USDocument27 pagesCoils and Electronics: Catalog HY15-3502/USPartsGopher.comNo ratings yet
- EP (Experiment Title)Document3 pagesEP (Experiment Title)PyiAungNo ratings yet
- OLTCDocument4 pagesOLTCGiwrgos GewrgiadisNo ratings yet
- Color Monitor: Service ManualDocument52 pagesColor Monitor: Service ManualAnonymous nC9gpUWPNo ratings yet
- 7011a 6-10kva SpecsDocument10 pages7011a 6-10kva SpecsOscar MorenoNo ratings yet
- ECAT 7 Past Papers PakLearningSpotDocument10 pagesECAT 7 Past Papers PakLearningSpotwww.mukkarram321No ratings yet
- Datasheet Flatpack2 48V HE RectifiersDocument2 pagesDatasheet Flatpack2 48V HE RectifiersRamon Goes Alexandre100% (1)
- 270 Mini Electronics Project With Circuit Diagram PDFDocument224 pages270 Mini Electronics Project With Circuit Diagram PDFCatch MeNo ratings yet