You might also like
- Sistema cardiovascular UANDocument2 pagesSistema cardiovascular UANValentin Perez TopeteNo ratings yet
- Sistema cardiovascular UANDocument2 pagesSistema cardiovascular UANValentin Perez TopeteNo ratings yet
- Unidad 2. El TransformadorDocument12 pagesUnidad 2. El TransformadorValentin Perez TopeteNo ratings yet
- Unidad 1. Circuitos Magnéticos PDFDocument12 pagesUnidad 1. Circuitos Magnéticos PDFValentin Perez TopeteNo ratings yet
- Sistema cardiovascular UANDocument2 pagesSistema cardiovascular UANValentin Perez TopeteNo ratings yet
- Unidad 1. Circuitos Magnéticos PDFDocument12 pagesUnidad 1. Circuitos Magnéticos PDFValentin Perez TopeteNo ratings yet
- CuestionarioDocument1 pageCuestionarioValentin Perez TopeteNo ratings yet
- Unidad 1. Circuitos Magnéticos PDFDocument12 pagesUnidad 1. Circuitos Magnéticos PDFValentin Perez TopeteNo ratings yet
- Unidad 1. Circuitos Magnéticos PDFDocument12 pagesUnidad 1. Circuitos Magnéticos PDFValentin Perez TopeteNo ratings yet
- Motores CDDocument3 pagesMotores CDValentin Perez TopeteNo ratings yet
- Motor UniversalDocument36 pagesMotor UniversalValentin Perez TopeteNo ratings yet
- Motor de Polos SombreadosDocument27 pagesMotor de Polos SombreadosValentin Perez TopeteNo ratings yet
- Conceptos EticaDocument5 pagesConceptos EticaValentin Perez TopeteNo ratings yet
- XDDocument8 pagesXDValentin Perez TopeteNo ratings yet
- 32 Planilla Notificacion QUANT Lub Hidraulica (1) (1) (Version 1)Document120 pages32 Planilla Notificacion QUANT Lub Hidraulica (1) (1) (Version 1)Rodrigo Culun DinamarcaNo ratings yet
- 5.TERMO-Primera Ley - AbiertosDocument59 pages5.TERMO-Primera Ley - AbiertosCarlosNo ratings yet
- Práctica 2 Me1. Características Constructivas de Un MotorDocument13 pagesPráctica 2 Me1. Características Constructivas de Un Motorintegral_vs_diferencialNo ratings yet
- Cargas de grúa Terex RT 230 de 27.2 toneladasDocument30 pagesCargas de grúa Terex RT 230 de 27.2 toneladasPizarro Andres0% (1)
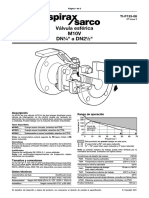
- Válvula Esférica M10V DN " A DN2 ": Descripción Rango de OperaciónDocument3 pagesVálvula Esférica M10V DN " A DN2 ": Descripción Rango de OperaciónMarcelo NoleNo ratings yet
- Torque de RotaciónDocument7 pagesTorque de RotaciónXimena J. Mamani MirandaNo ratings yet
- Compressor X As 186 DD SpanishDocument29 pagesCompressor X As 186 DD SpanishRicky VilNo ratings yet
- Vigas Hiperestáticas y Esfuerzos CombinadosDocument31 pagesVigas Hiperestáticas y Esfuerzos CombinadosGetza RumboNo ratings yet
- Manual de Operación Taladro Demoledor Electrico Tipo T Actividad 2Document6 pagesManual de Operación Taladro Demoledor Electrico Tipo T Actividad 2Jairo PushainaNo ratings yet
- Movimiento armónico y resonanciaDocument21 pagesMovimiento armónico y resonanciadenisNo ratings yet
- 10 ColisionesDocument6 pages10 ColisionesBelén ChacónNo ratings yet
- Conceptos Generales de Las Propiedades de Los MaterialesDocument15 pagesConceptos Generales de Las Propiedades de Los MaterialesJosé Oscar Vázquez EspinosaNo ratings yet
- Informe ManguerasDocument4 pagesInforme ManguerasJose TheranNo ratings yet
- Preguntas de Maquinas ElectricasDocument25 pagesPreguntas de Maquinas ElectricasPablo ZarazuaNo ratings yet
- Mantenimiento extractores informe técnicoDocument15 pagesMantenimiento extractores informe técnicomarioNo ratings yet
- F1 - S06 - PPT - Segunda Ley de Newton y Sus AplicacionesDocument16 pagesF1 - S06 - PPT - Segunda Ley de Newton y Sus AplicacionesJair LópezNo ratings yet
- Máquinas terminas: Segunda ley de la termodinámicaDocument7 pagesMáquinas terminas: Segunda ley de la termodinámicapercy gianmarco acosta salazarNo ratings yet
- Ajuste y ToleranciaDocument5 pagesAjuste y ToleranciaAdrian MayNo ratings yet
- Equipos FiltrosDocument13 pagesEquipos FiltrosBrayan Yesid Ibañez SanguinoNo ratings yet
- 2 ReynoldsDocument15 pages2 ReynoldsDavid Fernando Nieto GomezNo ratings yet
- Elementos para Obtener El Módulo de Reacción de SubrasanteDocument14 pagesElementos para Obtener El Módulo de Reacción de Subrasantebcsalcedo1994No ratings yet
- Palanca Documento 1Document10 pagesPalanca Documento 1Alice MedranoNo ratings yet
- Plan de Mantenimiento GeneralDocument59 pagesPlan de Mantenimiento GeneralENPATMOTTNo ratings yet
- Fuerza de presión en superficies sumergidasDocument12 pagesFuerza de presión en superficies sumergidasMEIER JOSUE QUILLAHUAMAN HUAMANNo ratings yet
- Silabo ClimatizacionDocument14 pagesSilabo ClimatizacioncheNo ratings yet
- Ae. 1.1.1. Ifim04Document8 pagesAe. 1.1.1. Ifim04Dailyn NoveloNo ratings yet
- Informe Final Arranque de MotoresDocument13 pagesInforme Final Arranque de Motoresricardob50d57% (7)
- 07 7M1 InvestigaciónDocument66 pages07 7M1 InvestigaciónAlex PootNo ratings yet
- Laboratorio 4 Tecnología IndustrialDocument14 pagesLaboratorio 4 Tecnología IndustrialJhanire RivasNo ratings yet
- Practica de REOLOGIA-Versión 2Document5 pagesPractica de REOLOGIA-Versión 2susana rendonNo ratings yet