You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Characteristic of Quality Function Point AnalysisDocument54 pagesCharacteristic of Quality Function Point Analysisabhinav.kishore89172950% (2)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Oc 6 Thsem, FTTHDocument20 pagesOc 6 Thsem, FTTHabhinav.kishore891729No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- AkbettDocument14 pagesAkbettabhinav.kishore891729No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- DFDDocument34 pagesDFDabhinav.kishore891729No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Semiconductor Sources Optical CommunicationsDocument30 pagesSemiconductor Sources Optical Communicationsabhinav.kishore891729No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- TrnsmsnmediaDocument19 pagesTrnsmsnmediaapi-3703205No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
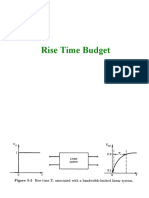
- Rise Time BudgetDocument11 pagesRise Time Budgetsectiona100% (5)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Unit 2: Underlying Technologies: Transmission Media (Section 3.1. Read On Your Own) Local Area Networks (Lans)Document27 pagesUnit 2: Underlying Technologies: Transmission Media (Section 3.1. Read On Your Own) Local Area Networks (Lans)abhinav.kishore891729No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Mscsatellite, MSC, FinalDocument49 pagesMscsatellite, MSC, Finalabhinav.kishore891729No ratings yet
- Oc 6 Thsem, SplicingDocument31 pagesOc 6 Thsem, Splicingabhinav.kishore891729No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Passive Optical Network (PON) : ITU-T RecommendationDocument19 pagesPassive Optical Network (PON) : ITU-T Recommendationabhinav.kishore891729No ratings yet
- Characteristics of Optical FiberDocument26 pagesCharacteristics of Optical Fiberabhinav.kishore891729No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Optical Sources: Friday, March 26, 2010 1Document53 pagesOptical Sources: Friday, March 26, 2010 1abhinav.kishore891729No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Synchronous Optical Network (Sonet)Document16 pagesSynchronous Optical Network (Sonet)abhinav.kishore891729No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Oc 6 Thsem, SDHDocument83 pagesOc 6 Thsem, SDHabhinav.kishore891729No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Power BudgetDocument13 pagesPower BudgetsectionaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Fibre Optic Comunications An IntroductionDocument24 pagesFibre Optic Comunications An Introductionabhinav.kishore891729No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- O.F. Cable Design: - To Use Fibre Optic Safely - One or More Fibres Put Together & Properly Protected - Cabling ImprovesDocument18 pagesO.F. Cable Design: - To Use Fibre Optic Safely - One or More Fibres Put Together & Properly Protected - Cabling Improvesabhinav.kishore891729No ratings yet
- Honey Commission InternationalDocument62 pagesHoney Commission Internationallevsoy672173No ratings yet
- Inner WordDocument7 pagesInner WordMico SavicNo ratings yet
- Unit 2 Technological Change Population and Growth 1.0Document33 pagesUnit 2 Technological Change Population and Growth 1.0knowme73No ratings yet
- RealPOS 70Document182 pagesRealPOS 70TextbookNo ratings yet
- L16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiDocument25 pagesL16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiMehul VarshneyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Clinic Management System (24 PGS)Document24 pagesClinic Management System (24 PGS)pranithNo ratings yet
- A. Johnston - Naturalism and Anti NaturalismDocument47 pagesA. Johnston - Naturalism and Anti NaturalismaguiaradNo ratings yet
- Recording and reporting in hospitals and nursing collegesDocument48 pagesRecording and reporting in hospitals and nursing collegesRaja100% (2)
- 5.mpob - LeadershipDocument21 pages5.mpob - LeadershipChaitanya PillalaNo ratings yet
- MBA Study On Organisational Culture and Its Impact On Employees Behaviour - 237652089Document64 pagesMBA Study On Organisational Culture and Its Impact On Employees Behaviour - 237652089sunitha kada55% (20)
- Roman Questions II PDFDocument738 pagesRoman Questions II PDFjlinderski100% (3)
- Two Monuments by C Mann 1493 Copy - PDF - OcredDocument23 pagesTwo Monuments by C Mann 1493 Copy - PDF - OcredStephania FrancoNo ratings yet
- Materi Green SCMDocument38 pagesMateri Green SCManandaailanthusNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Manual For The MCPL Programming LanguageDocument74 pagesManual For The MCPL Programming Languagechri1753No ratings yet
- Fazlur Khan - Father of Tubular Design for Tall BuildingsDocument19 pagesFazlur Khan - Father of Tubular Design for Tall BuildingsyisauNo ratings yet
- 【小马过河】35 TOEFL iBT Speaking Frequent WordsDocument10 pages【小马过河】35 TOEFL iBT Speaking Frequent WordskakiwnNo ratings yet
- Growing Up Psychic by Chip Coffey - ExcerptDocument48 pagesGrowing Up Psychic by Chip Coffey - ExcerptCrown Publishing Group100% (1)
- Mosek UserguideDocument81 pagesMosek UserguideadethroNo ratings yet
- Dswd-As-Gf-018 - Rev 03 - Records Disposal RequestDocument1 pageDswd-As-Gf-018 - Rev 03 - Records Disposal RequestKim Mark C ParaneNo ratings yet
- Investigation of Water Resources Projects - Preparation of DPRDocument148 pagesInvestigation of Water Resources Projects - Preparation of DPRN.J. PatelNo ratings yet
- Grammar Booster: Lesson 1Document1 pageGrammar Booster: Lesson 1Diana Carolina Figueroa MendezNo ratings yet
- A Comparative Marketing Study of LG ElectronicsDocument131 pagesA Comparative Marketing Study of LG ElectronicsAshish JhaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MC145031 Encoder Manchester PDFDocument10 pagesMC145031 Encoder Manchester PDFson_gotenNo ratings yet
- Fiber Optic Communication PDFDocument2 pagesFiber Optic Communication PDFluisperikoNo ratings yet
- Omega Fluid PDFDocument2 pagesOmega Fluid PDFapatzinfedNo ratings yet
- Google Fusion Tables: A Case StudyDocument4 pagesGoogle Fusion Tables: A Case StudySeanNo ratings yet
- Print Application FormDocument4 pagesPrint Application Formarjun guptaNo ratings yet
- Geo Lab Report Point LoadDocument9 pagesGeo Lab Report Point Loaddrbrainsol50% (2)
- Research ProposalDocument2 pagesResearch ProposalHo Manh LinhNo ratings yet
- What Is Science Cornell Notes ExampleDocument3 pagesWhat Is Science Cornell Notes Exampleapi-240096234No ratings yet
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeFrom EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeNo ratings yet
- The Tennis Partner: A Doctor's Story of Friendship and LossFrom EverandThe Tennis Partner: A Doctor's Story of Friendship and LossRating: 4.5 out of 5 stars4.5/5 (4)
- The Age of Magical Overthinking: Notes on Modern IrrationalityFrom EverandThe Age of Magical Overthinking: Notes on Modern IrrationalityRating: 4 out of 5 stars4/5 (13)