You might also like
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- Philips P89C51RD2 6Document52 pagesPhilips P89C51RD2 6api-3726520No ratings yet
- IDE51Document116 pagesIDE51api-3726520No ratings yet
- Resume 2Document2 pagesResume 2api-3726520No ratings yet
- C51 PrimerDocument190 pagesC51 PrimerQuan ThanhNo ratings yet
- Prayog51 MannualDocument43 pagesPrayog51 Mannualapi-3726520100% (1)
- Writing C Code For The 8051Document52 pagesWriting C Code For The 8051BHUSHANNo ratings yet
- TR51Document68 pagesTR51api-3726520No ratings yet
- REF Prayog51 MannualDocument42 pagesREF Prayog51 Mannualapi-3726520No ratings yet
- Lecture 2 C ProgrammingDocument14 pagesLecture 2 C Programmingapi-3726520100% (2)
- 24C512Document20 pages24C512pravinrautrautNo ratings yet
- Gs51 Keil IntroDocument230 pagesGs51 Keil IntroMindfield MiNo ratings yet
- IDE51Document116 pagesIDE51api-3726520No ratings yet
- 8051Document24 pages8051api-3726520100% (1)
- I2C BusDocument126 pagesI2C Busapi-3726520100% (2)
- GMCS 51RD2 Interfacing TechniquesDocument55 pagesGMCS 51RD2 Interfacing Techniquesapi-3726520No ratings yet
- Archi 8051Document31 pagesArchi 8051api-3726520No ratings yet
- 24C512Document20 pages24C512pravinrautrautNo ratings yet
- The 8051 Assembly LanguageDocument82 pagesThe 8051 Assembly Languageapi-3726520100% (1)
- C51Document393 pagesC51api-3726520100% (1)
- Complete RefDocument424 pagesComplete Refapi-3726520No ratings yet
- A 51Document415 pagesA 51api-3726520No ratings yet
- C51Document393 pagesC51api-3726520100% (1)
- JVMDocument6 pagesJVMapi-3738830No ratings yet
- AT24C512 2tpDocument4 pagesAT24C512 2tpapi-3726520No ratings yet
- MVMWhite PaperDocument9 pagesMVMWhite Paperapi-3726520No ratings yet
- 1933BDocument14 pages1933Bapi-3726520No ratings yet
- Placement GuideDocument457 pagesPlacement Guideapi-3760682No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lab - 07 PDFDocument5 pagesLab - 07 PDFusman_ashraf678No ratings yet
- Wireless j1939 To WifiDocument1 pageWireless j1939 To WifiWillington Augusto ArizaNo ratings yet
- OS6850 AOS 6.4.3 R01 Hardware Guide PDFDocument192 pagesOS6850 AOS 6.4.3 R01 Hardware Guide PDFKarl Pepon AyalaNo ratings yet
- 1 GSM Principles and Call FlowDocument263 pages1 GSM Principles and Call Flowjitu_rf100% (1)
- AIS Configuration WIZ107SRDocument4 pagesAIS Configuration WIZ107SRmarcatiusNo ratings yet
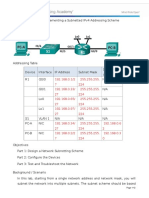
- 8.1.4.8 Lab - Designing and Implementing A Subnetted IPv4 Addressing SchemeDocument12 pages8.1.4.8 Lab - Designing and Implementing A Subnetted IPv4 Addressing SchemeParthPatel90% (31)
- NG-PON1: Technology Presentation, Implementation in Practice and Coexistence With The GPON SystemDocument7 pagesNG-PON1: Technology Presentation, Implementation in Practice and Coexistence With The GPON SystemwilfriedNo ratings yet
- IPv6@ESTG-Leiria IPv6Wireless Relatorio FinalDocument94 pagesIPv6@ESTG-Leiria IPv6Wireless Relatorio FinalAndré MadeiraNo ratings yet
- 1.cisco CCNA Access Control ListsDocument10 pages1.cisco CCNA Access Control ListsClausHoxhaNo ratings yet
- DNS CatDocument14 pagesDNS CatRonald RamirezNo ratings yet
- Bluecoat SGOSAdmin6.77 PDFDocument1,642 pagesBluecoat SGOSAdmin6.77 PDFDiego pozo figueroa0% (1)
- BC-6800 - BC-6600 - Communication Protocol - V9.0 - ENDocument157 pagesBC-6800 - BC-6600 - Communication Protocol - V9.0 - ENHuy Trung GiápNo ratings yet
- MAX14830 Evaluation KitDocument15 pagesMAX14830 Evaluation KitStef GaudreauNo ratings yet
- NA-9187 S-Series Profinet-NetworkAdapter UserManualDocument19 pagesNA-9187 S-Series Profinet-NetworkAdapter UserManualHưng TrươngNo ratings yet
- Cisco 1100 Series SWCFG Chapter 01011 PDFDocument76 pagesCisco 1100 Series SWCFG Chapter 01011 PDFreferenceref31No ratings yet
- Task 1: Analyze Cisco Express ForwardingDocument3 pagesTask 1: Analyze Cisco Express ForwardingIonut StanciuNo ratings yet
- 301v04020006 Cor3Document158 pages301v04020006 Cor3Anonymous AOsAXgNo ratings yet
- AIBUS ProtocolDocument7 pagesAIBUS ProtocolAlison MitchellNo ratings yet
- DHCP PresentationDocument25 pagesDHCP PresentationAnonymous MVbaaUBSZTNo ratings yet
- Network Slicing and Performance Analysis of 5g Networks Based On PriorityDocument5 pagesNetwork Slicing and Performance Analysis of 5g Networks Based On Priorityzayyanu yunusaNo ratings yet
- 642 785Document56 pages642 785Cristina JuravleNo ratings yet
- Comptia Cloud Cv0 003 Exam ObjectivesDocument18 pagesComptia Cloud Cv0 003 Exam ObjectivesSafari MatabishNo ratings yet
- Lab Security Policy Cyber Security PolicyDocument4 pagesLab Security Policy Cyber Security PolicyISCNo ratings yet
- F5 BIGIP Configuration ExamplesDocument7 pagesF5 BIGIP Configuration Examplesman_kun8767% (3)
- PROFINET Design Guideline 8062 V153 Sept22Document242 pagesPROFINET Design Guideline 8062 V153 Sept22Gabriel NascimentoNo ratings yet
- Expl WAN Chapter 1 Intro WANsDocument82 pagesExpl WAN Chapter 1 Intro WANsLeo LaguiNo ratings yet
- Bizhub c754 c654 c554 c454 c364 c284 c224 HTTP One Way Guide PDFDocument20 pagesBizhub c754 c654 c554 c454 c364 c284 c224 HTTP One Way Guide PDFمصعب الغريبNo ratings yet
- HCIP-Security-CISN V3.0 mock exam questionsDocument4 pagesHCIP-Security-CISN V3.0 mock exam questionsToffe Gokale Michel100% (1)
- EspDocument8 pagesEspJestoni RapalNo ratings yet
- (FBM230231232233) User's GuideDocument240 pages(FBM230231232233) User's Guidemissoum mohamed100% (3)