You might also like
- Airfoil Investigation Database - Showing Naca-2412Document1 pageAirfoil Investigation Database - Showing Naca-2412sudharshanreddymNo ratings yet
- Kinematic Simulation of Staubli TX40 Robot-ICMDocument6 pagesKinematic Simulation of Staubli TX40 Robot-ICMRicardo GuerreroNo ratings yet
- DC Servo Paper - Cse007Document4 pagesDC Servo Paper - Cse007DrPrashant M. MenghalNo ratings yet
- Engine Modeling A KeromnesDocument42 pagesEngine Modeling A KeromnesIvan GrujicNo ratings yet
- Ch2 Modeling in Frequency DomainDocument66 pagesCh2 Modeling in Frequency DomainWei-Hsin CheinNo ratings yet
- 3D Model of Fuel Tank For System Simulation (En)Document78 pages3D Model of Fuel Tank For System Simulation (En)BeaNo ratings yet
- 15c HPDocument288 pages15c HPJose Antonio MercadoNo ratings yet
- Chapter.3 Design of Commutator and BrushesDocument10 pagesChapter.3 Design of Commutator and BrushesFernando Rmz100% (1)
- Technical Writing A-Z: A Commonsense Guide to Engineering Reports and Theses, Second Edition, British English: A Commonsense Guide to Engineering Reports and Theses, U.S. English Second EditionFrom EverandTechnical Writing A-Z: A Commonsense Guide to Engineering Reports and Theses, Second Edition, British English: A Commonsense Guide to Engineering Reports and Theses, U.S. English Second EditionNo ratings yet
- Stress Intensity Factors HandbookDocument26 pagesStress Intensity Factors HandbookJad Antonios Jelwan0% (1)
- NAM Cat CombinedCh1Document16 pagesNAM Cat CombinedCh1Thanh Do VanNo ratings yet
- Modeling A Two Wheeled Inverted Pendulum RobotDocument59 pagesModeling A Two Wheeled Inverted Pendulum Robotcdsiegert100% (2)
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationFrom EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationNo ratings yet
- HP 15C Quick ReferenceDocument16 pagesHP 15C Quick Referencejeff_56No ratings yet
- Ohmtech A/S: Visual Vessel DesignDocument23 pagesOhmtech A/S: Visual Vessel Designwindsurferke007No ratings yet
- HPU - Pressure IntensifierDocument9 pagesHPU - Pressure IntensifierCristin PasatNo ratings yet
- 603 DDocument8 pages603 DreluNo ratings yet
- Gimbals Election GuideDocument14 pagesGimbals Election GuideRina PngNo ratings yet
- Commutator (Electric) : From Wikipedia, The Free EncyclopediaDocument12 pagesCommutator (Electric) : From Wikipedia, The Free EncyclopediaEdito Abrantes BalugoNo ratings yet
- Final Cruise ControlDocument26 pagesFinal Cruise ControlKusum LataNo ratings yet
- HP-19C & 29C Solutions Games 1977 B&WDocument42 pagesHP-19C & 29C Solutions Games 1977 B&WjjirwinNo ratings yet
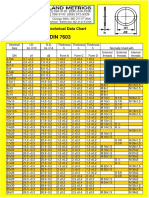
- Din 7603 - 1Document3 pagesDin 7603 - 1emre taşNo ratings yet
- Visual Vessel Design FAQDocument23 pagesVisual Vessel Design FAQsierthinNo ratings yet
- Intro PIC18 Assembly LanguageDocument15 pagesIntro PIC18 Assembly Languagevolhov100% (4)
- HP-16C Quick Reference: General Calculator ControlDocument5 pagesHP-16C Quick Reference: General Calculator ControlhowardcarterNo ratings yet
- Selkirk PS/IPSDocument8 pagesSelkirk PS/IPSMel MudhookNo ratings yet
- In Elastic Buckling of Geometrically Imperfect TubesDocument16 pagesIn Elastic Buckling of Geometrically Imperfect TubesSiva RajNo ratings yet
- Kinematics & Dynamics of MachineryDocument43 pagesKinematics & Dynamics of MachineryWolfgang HoofmeisterNo ratings yet
- ASME B16.10M-2000 Welded and Seamless Wrought Steel PipeDocument32 pagesASME B16.10M-2000 Welded and Seamless Wrought Steel PipeNam Hoai NamNo ratings yet
- Machine Learning Accelerated Computational Fluid Dynamics - KochkovDocument13 pagesMachine Learning Accelerated Computational Fluid Dynamics - KochkovrandNo ratings yet
- Sinusoidal Synthesis of Speech Using MATLABDocument35 pagesSinusoidal Synthesis of Speech Using MATLABAkshay JainNo ratings yet
- GMSHDocument272 pagesGMSHfylypeNo ratings yet
- An Insight Into Magneto Rheological DampersDocument239 pagesAn Insight Into Magneto Rheological DampersashutoshmanchandaNo ratings yet
- Design, Construction and Testing of A Low-Speed Wind Tunnel: Kumaresan Cunden & Professor Freddie L. InambaoDocument20 pagesDesign, Construction and Testing of A Low-Speed Wind Tunnel: Kumaresan Cunden & Professor Freddie L. InambaoTJPRC PublicationsNo ratings yet
- Field Welds FAQ: Chempute Software (Pty) LTD P.O.Box 856, Kloof, 3640, South AfricaDocument3 pagesField Welds FAQ: Chempute Software (Pty) LTD P.O.Box 856, Kloof, 3640, South Africasonnyciataia100% (1)
- Develop3D Ebook - The Importance of Drawings - tcm27-2694Document4 pagesDevelop3D Ebook - The Importance of Drawings - tcm27-2694schumiizz2bestNo ratings yet
- DSadm RefDocument312 pagesDSadm RefDan MatincaNo ratings yet
- Curved Heads DIN 28011/cap Form: 1 CoverageDocument6 pagesCurved Heads DIN 28011/cap Form: 1 CoverageE Santosh KumarNo ratings yet
- Nickel Rod and Bar: Standard Specification ForDocument6 pagesNickel Rod and Bar: Standard Specification ForSrinivasan KrishnamoorthyNo ratings yet
- Lacey Thacker TutorialDocument10 pagesLacey Thacker TutorialWilliam Pinto HernándezNo ratings yet
- Main Fuel Valve - Liquid Rocket Engines (J-2X, RS-25, General)Document19 pagesMain Fuel Valve - Liquid Rocket Engines (J-2X, RS-25, General)ygzylmzNo ratings yet
- b31870818 PDFDocument352 pagesb31870818 PDFHarshal VaidyaNo ratings yet
- Nasa SP 8119Document161 pagesNasa SP 8119Michelle AtkinsNo ratings yet
- Fe SafeDocument13 pagesFe SafeManjinderSinghNo ratings yet
- Effects of Thermal LoadsDocument12 pagesEffects of Thermal LoadshamadaniNo ratings yet
- Asme B73: Centrifugal Pump Data SheetDocument4 pagesAsme B73: Centrifugal Pump Data SheetRisyda PutriNo ratings yet
- Whitcomb Area Rule: Modeling Geometry: TutorialDocument28 pagesWhitcomb Area Rule: Modeling Geometry: TutorialMANABENDRANo ratings yet
- N.a.C.a. Aircraft Circular No.18 - 1926-10 - The de Havilland MothDocument8 pagesN.a.C.a. Aircraft Circular No.18 - 1926-10 - The de Havilland MothPiero CaprettiNo ratings yet
- Residential Sprinkler System Design Handbook: A Step-By-Step Introduction To Design and InstallationDocument20 pagesResidential Sprinkler System Design Handbook: A Step-By-Step Introduction To Design and Installationambition1340cnNo ratings yet
- Torsional Analysis Horizontal PumpDocument3 pagesTorsional Analysis Horizontal PumpAnonymous CMS3dL1TNo ratings yet
- Nichias Gasket Tombo1995Document3 pagesNichias Gasket Tombo1995Richard SmithNo ratings yet
- Automation With APDLDocument40 pagesAutomation With APDLjsmnjasminesNo ratings yet
- Rockwell 2025 2024 Plug ValvesDocument60 pagesRockwell 2025 2024 Plug ValvesJohnNo ratings yet
- Mathworks Product Overview: Accelerating The Pace of Engineering and ScienceDocument6 pagesMathworks Product Overview: Accelerating The Pace of Engineering and ScienceTapasRoutNo ratings yet
- Introduccion Matlab EmilyDocument99 pagesIntroduccion Matlab EmilyGeorgina Violet RamirezNo ratings yet
- System Identification Toolbox - Reference MatlabDocument1,249 pagesSystem Identification Toolbox - Reference MatlabWillian Leão100% (1)
- Matlab Project FileDocument27 pagesMatlab Project FileHimanshu ShisodiaNo ratings yet
- Eda Lab ManualDocument25 pagesEda Lab ManualAthiraRemeshNo ratings yet
- Assignment 1: Modeling and Simulation of Car Steering SystemsDocument4 pagesAssignment 1: Modeling and Simulation of Car Steering SystemsshyamNo ratings yet
- Data Types in CDocument10 pagesData Types in CDebanshu MohantyNo ratings yet
- Mood Classification of Hindi Songs Based On Lyrics: December 2015Document8 pagesMood Classification of Hindi Songs Based On Lyrics: December 2015lalit kashyapNo ratings yet
- Giesecke, Kay - 3-D Apraxic Therapy For KidsDocument6 pagesGiesecke, Kay - 3-D Apraxic Therapy For KidsampiccaNo ratings yet
- ENGLISH 10 - Q1 - Mod2 - Writing A News ReportDocument13 pagesENGLISH 10 - Q1 - Mod2 - Writing A News ReportFrancesca Shamelle Belicano RagasaNo ratings yet
- Lesson Plan Template: Teacher Candidate: Kelly Willinger School: Promise Grade Level: 5 Room Number: 310Document13 pagesLesson Plan Template: Teacher Candidate: Kelly Willinger School: Promise Grade Level: 5 Room Number: 310api-341625641No ratings yet
- Patience Module Tasks 2Document8 pagesPatience Module Tasks 2Juvy HernaniNo ratings yet
- 4 .Airport Air Traffic ControlDocument43 pages4 .Airport Air Traffic ControlEsrah HareemNo ratings yet
- R. O. Faulkner - The Ancient Egyptian Coffin Texts - Vol. 1Document299 pagesR. O. Faulkner - The Ancient Egyptian Coffin Texts - Vol. 1Exequiel Medina88% (8)
- Cwe-776: Improper Restriction of Recursive Entity References in Dtds ('XML Entity Expansion')Document3 pagesCwe-776: Improper Restriction of Recursive Entity References in Dtds ('XML Entity Expansion')maria dianaNo ratings yet
- Lectures Hands-On HTMLDocument66 pagesLectures Hands-On HTMLAfar SalvadoraNo ratings yet
- Soal UTS Paragraph WritingDocument1 pageSoal UTS Paragraph WritingZaitun RahmatNo ratings yet
- Min Oh 1995 PHD ThesisDocument183 pagesMin Oh 1995 PHD ThesisPriya DasNo ratings yet
- The Prayer of Ibn Mashīsh (As Salāt Al-Mashīshīyah) (Titus Burckhardt) PDFDocument4 pagesThe Prayer of Ibn Mashīsh (As Salāt Al-Mashīshīyah) (Titus Burckhardt) PDFIsraelNo ratings yet
- Teamcenter 8.3 Release Bulletin: Publication Number PLM00001 G (01-037134-083)Document273 pagesTeamcenter 8.3 Release Bulletin: Publication Number PLM00001 G (01-037134-083)Tungdinh NguyenNo ratings yet
- SyntaxDocument5 pagesSyntaxTria MokogintaNo ratings yet
- Ati RN Proctored Comprehensive Predictor 2019 Form CDocument22 pagesAti RN Proctored Comprehensive Predictor 2019 Form CWalterChansfnc100% (42)
- Action Verbs: Tell About Something in A State of Being. A Noun or Pronoun Does Not Always Take ActionDocument27 pagesAction Verbs: Tell About Something in A State of Being. A Noun or Pronoun Does Not Always Take ActionSyafina MANo ratings yet
- The One Where Joey Speaks FrenchDocument3 pagesThe One Where Joey Speaks FrenchLa Spera OttavaNo ratings yet
- Simple Past Reading ComprehensionDocument3 pagesSimple Past Reading ComprehensionAlex RomeroNo ratings yet
- Capstone Project ReportDocument63 pagesCapstone Project ReportDNYANESH PIMPLENo ratings yet
- Ebook PDF Cognitive Science An Introduction To The Science of The Mind 2nd Edition PDFDocument41 pagesEbook PDF Cognitive Science An Introduction To The Science of The Mind 2nd Edition PDFdavid.roberts311100% (43)
- IGCSE Computer Science - 2210 - Chapter 3Document16 pagesIGCSE Computer Science - 2210 - Chapter 3Owais Ahmed100% (1)
- Simple Present Vs Present ContinuousDocument5 pagesSimple Present Vs Present ContinuousErik VegBas100% (1)
- Ccrma Stanford Edu Jos PaspDocument1 pageCcrma Stanford Edu Jos PaspgovebNo ratings yet
- Translation Services BrochureDocument8 pagesTranslation Services Brochureapi-251019229No ratings yet
- Symmetric Cryptography: Classical Cipher: SubstitutionDocument56 pagesSymmetric Cryptography: Classical Cipher: SubstitutionShorya KumarNo ratings yet
- Karaite LiturgyDocument11 pagesKaraite LiturgyKen BowenNo ratings yet
- Gnenral P CSCF ArchitectureDocument81 pagesGnenral P CSCF ArchitectureAsit SwainNo ratings yet
- Chapters 2 and 3 Notes: Parallel Lines and Triangles: ConstructionsDocument3 pagesChapters 2 and 3 Notes: Parallel Lines and Triangles: ConstructionsFiffy Nadiah SyafiahNo ratings yet
- Ipocc Watchdog enDocument50 pagesIpocc Watchdog enMarthaGutnaraNo ratings yet