You might also like
- Adjustment and Impulse Control DisordersDocument19 pagesAdjustment and Impulse Control DisordersArchana50% (4)
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (2)
- ch09 Morris ManoDocument15 pagesch09 Morris ManoYogita Negi RawatNo ratings yet
- 236b3 Esquema Electrico Mini Cargador CatDocument29 pages236b3 Esquema Electrico Mini Cargador Cathenry laviera100% (2)
- Causes of The Renaissance: Silk RoadDocument6 pagesCauses of The Renaissance: Silk RoadCyryhl GutlayNo ratings yet
- Chapter 6 - PipeliningDocument61 pagesChapter 6 - PipeliningShravani ShravzNo ratings yet
- Mafia Bride by CD Reiss (Reiss, CD)Document200 pagesMafia Bride by CD Reiss (Reiss, CD)Aurniaa InaraaNo ratings yet
- Chapter6 - PipeliningDocument61 pagesChapter6 - PipeliningPrakash SubramanianNo ratings yet
- Pipe LiningDocument29 pagesPipe LiningAnkitShingalaNo ratings yet
- Unit3 PipeliningDocument54 pagesUnit3 PipeliningDevi PagavanNo ratings yet
- Chapter 8 - PipeliningDocument38 pagesChapter 8 - Pipeliningnagpal3No ratings yet
- Chapter 8 - PipeliningDocument31 pagesChapter 8 - PipeliningAnita Sofia KeyserNo ratings yet
- Basic Concepts1Document18 pagesBasic Concepts1Selva KumarNo ratings yet
- The Big Picture: Requirements Algorithms Prog. Lang./Os Isa Uarch Circuit DeviceDocument60 pagesThe Big Picture: Requirements Algorithms Prog. Lang./Os Isa Uarch Circuit DevicevshlvvkNo ratings yet
- SIMD Machines:: Pipeline SystemDocument35 pagesSIMD Machines:: Pipeline Systempssdk99hfdNo ratings yet
- Pipelining Hazards LectureDocument42 pagesPipelining Hazards LectureRida AmjadNo ratings yet
- RISC Hardware Pipeline PerformanceDocument12 pagesRISC Hardware Pipeline PerformanceAmrendra Kumar MishraNo ratings yet
- Computer Architecture Pipe LineDocument28 pagesComputer Architecture Pipe LineNAHID TECHNOLOGYNo ratings yet
- 2 - Performance IssueDocument4 pages2 - Performance IssueTinkuNo ratings yet
- DAR ES SALAAM INSTITUTE OF TECHNOLOGY Lecture on PipeliningDocument16 pagesDAR ES SALAAM INSTITUTE OF TECHNOLOGY Lecture on Pipeliningnoberth nikombolweNo ratings yet
- Pipelining (All Slides)Document45 pagesPipelining (All Slides)NISHIT JAINNo ratings yet
- MULTIcycle OPERATIONSDocument24 pagesMULTIcycle OPERATIONSi_2loveu3235No ratings yet
- Lec18 PipelineDocument59 pagesLec18 PipelineAliGhandiNo ratings yet
- CSC 424 AssignmentDocument8 pagesCSC 424 AssignmentBalsesbiz Consults100% (1)
- Pipeline: A Simple Implementation of A RISC Instruction SetDocument16 pagesPipeline: A Simple Implementation of A RISC Instruction SetakhileshNo ratings yet
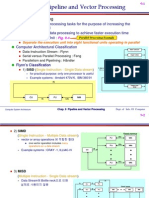
- UNIT-5: Pipeline and Vector ProcessingDocument63 pagesUNIT-5: Pipeline and Vector ProcessingAkash KankariaNo ratings yet
- 4-PipelineDocument30 pages4-Pipelinesingaram112No ratings yet
- Chapter6 Pipelining 141116000614 Conversion Gate01Document78 pagesChapter6 Pipelining 141116000614 Conversion Gate01Amit PanchalNo ratings yet
- Pipelinehazard For ClassDocument61 pagesPipelinehazard For ClassJayanta SikdarNo ratings yet
- Pipeline HazardsDocument39 pagesPipeline HazardsPranidhi RajvanshiNo ratings yet
- PARALLELISM: PIPELINING, HAZARDS, BRANCHESDocument24 pagesPARALLELISM: PIPELINING, HAZARDS, BRANCHESPraki SachuNo ratings yet
- Pipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathDocument12 pagesPipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathNgat SkyNo ratings yet
- Instruction PipelineDocument16 pagesInstruction PipelineRamya RamasubramanianNo ratings yet
- 2 Performance IssueDocument4 pages2 Performance IssueRajat BarmanNo ratings yet
- Mit VliwDocument30 pagesMit VliwjahNo ratings yet
- 第七章 PIPELININGDocument49 pages第七章 PIPELININGbill100% (1)
- Computer Organization and Architecture Cs2253: Part-ADocument21 pagesComputer Organization and Architecture Cs2253: Part-AjanukarthiNo ratings yet
- COA Unit 3Document89 pagesCOA Unit 3NiRuPaMaPaDmAnAbHaNNo ratings yet
- Module 5 - PipeliningDocument61 pagesModule 5 - Pipeliningsathishkumar.sNo ratings yet
- chapter6- PipeliningDocument61 pageschapter6- Pipeliningv69gnf5csyNo ratings yet
- Zoom/Online Final - question Q1TITLE: Online Final Q1 PipeliningDocument3 pagesZoom/Online Final - question Q1TITLE: Online Final Q1 PipeliningMuhammad Zahid iqbalNo ratings yet
- Comparch Comparch 002 Problem Sets PS2 S2YZjVuz57Document2 pagesComparch Comparch 002 Problem Sets PS2 S2YZjVuz57Vijay PreethamNo ratings yet
- Assignment 2 SolutionDocument4 pagesAssignment 2 SolutionAaliya Ali Abdul0% (1)
- DPCO Unit 4 2mark Q&ADocument11 pagesDPCO Unit 4 2mark Q&Akanimozhi rajasekarenNo ratings yet
- Pipeline Processor DesignDocument89 pagesPipeline Processor Designkumarguptav91No ratings yet
- Unit-5 (Coa) NotesDocument33 pagesUnit-5 (Coa) NotesyashNo ratings yet
- Lecture 1Document10 pagesLecture 1Asim Arunava Sahoo100% (1)
- Pipelines - #1 RISC ISA Without PipeDocument9 pagesPipelines - #1 RISC ISA Without PipeHussain HajjarNo ratings yet
- Chapter 2Document32 pagesChapter 2adane ararsoNo ratings yet
- Chapter 6 PipeliningDocument58 pagesChapter 6 Pipeliningvinoliamanohar100% (1)
- Coa Lecture Unit 3 PipeliningDocument95 pagesCoa Lecture Unit 3 PipeliningSumathy JayaramNo ratings yet
- Hafta 14Document23 pagesHafta 14nausicaatetooNo ratings yet
- 2 Marks - CoADocument4 pages2 Marks - CoADevadharshini SNo ratings yet
- Aca Midsem2011 Question PaperDocument1 pageAca Midsem2011 Question PaperKartik MakkarNo ratings yet
- Lec-10 Software PipeliningDocument24 pagesLec-10 Software Pipelininghimanshu_agraNo ratings yet
- Lec18-Static BRANCH PREDICTION VLIWDocument40 pagesLec18-Static BRANCH PREDICTION VLIWi_2loveu3235No ratings yet
- BASIC PIPELINING CONCEPTSDocument26 pagesBASIC PIPELINING CONCEPTSJust AndroNo ratings yet
- Unit IIDocument84 pagesUnit IISenthil RajNo ratings yet
- Pipelined MIPS: Why pipelining improves performance and the challenges of implementing pipeliningDocument12 pagesPipelined MIPS: Why pipelining improves performance and the challenges of implementing pipeliningasifsultanNo ratings yet
- Co - Unit Ii - IiDocument34 pagesCo - Unit Ii - Iiy22cd125No ratings yet
- Lecturer No 1 - Transformer BasicDocument1 pageLecturer No 1 - Transformer Basiclvb123No ratings yet
- Thesis PromptsDocument7 pagesThesis Promptsauroratuckernewyork100% (2)
- The Leaders of The NationDocument3 pagesThe Leaders of The NationMark Dave RodriguezNo ratings yet
- Goldenberg and Reddy (2017)Document10 pagesGoldenberg and Reddy (2017)Mariana ToniniNo ratings yet
- V Bhebhe PDFDocument63 pagesV Bhebhe PDFVusi BhebheNo ratings yet
- Localized Commercial LeafletDocument14 pagesLocalized Commercial LeafletJohn Kim CarandangNo ratings yet
- 2017 Grade 9 Math Challenge OralsDocument3 pages2017 Grade 9 Math Challenge OralsGracy Mae PanganibanNo ratings yet
- Image Formation in Plane Mirrors: Ray DiagramsDocument3 pagesImage Formation in Plane Mirrors: Ray DiagramsSouvik BanerjeeNo ratings yet
- Theories of Translation12345Document22 pagesTheories of Translation12345Ishrat FatimaNo ratings yet
- Wilo Mather and Platt Pumps Pvt. LTD.: Technical DatasheetDocument2 pagesWilo Mather and Platt Pumps Pvt. LTD.: Technical DatasheetTrung Trần MinhNo ratings yet
- Split Plot Design GuideDocument25 pagesSplit Plot Design GuidefrawatNo ratings yet
- Sri Lanka, CBSLDocument24 pagesSri Lanka, CBSLVyasIRMANo ratings yet
- Untitled DocumentDocument2 pagesUntitled DocumentChristopher BellardNo ratings yet
- TG KPWKPDocument8 pagesTG KPWKPDanmar CamilotNo ratings yet
- Biology 11th Edition Mader Test BankDocument25 pagesBiology 11th Edition Mader Test BankAnthonyWeaveracey100% (44)
- Female and Male Hacker Conferences Attendees: Their Autism-Spectrum Quotient (AQ) Scores and Self-Reported Adulthood ExperiencesDocument25 pagesFemale and Male Hacker Conferences Attendees: Their Autism-Spectrum Quotient (AQ) Scores and Self-Reported Adulthood Experiencesanon_9874302No ratings yet
- E TN SWD Csa A23 3 94 001 PDFDocument9 pagesE TN SWD Csa A23 3 94 001 PDFRazvan RobertNo ratings yet
- Delhi Police ResultDocument26 pagesDelhi Police ResultExam Aspirant100% (1)
- Encrypt and decrypt a file using AESDocument5 pagesEncrypt and decrypt a file using AESShaunak bagadeNo ratings yet
- Hope 03 21 22Document3 pagesHope 03 21 22Shaina AgravanteNo ratings yet
- School readiness assessmentDocument10 pagesSchool readiness assessmentJave Gene De AquinoNo ratings yet
- VIACRYL VSC 6250w/65MP: Technical DatasheetDocument2 pagesVIACRYL VSC 6250w/65MP: Technical DatasheetPratik MehtaNo ratings yet
- SRT95 Engine Power TakeoffDocument20 pagesSRT95 Engine Power TakeoffoktopusNo ratings yet
- JASA SREVIS LAPTOP Dan KOMPUTERDocument2 pagesJASA SREVIS LAPTOP Dan KOMPUTERindimideaNo ratings yet
- Atlanta Pipes and FittingsDocument2 pagesAtlanta Pipes and Fittingsotadoyreychie31No ratings yet
- Polifur 1K Synthetic Top Coat MSDS Rev 2 ENDocument14 pagesPolifur 1K Synthetic Top Coat MSDS Rev 2 ENvictorzy06No ratings yet