You might also like
- Lewis Corporation Case 6-2 - Group 5Document8 pagesLewis Corporation Case 6-2 - Group 5Om Prakash100% (1)
- PeopleSoft Security TablesDocument8 pagesPeopleSoft Security TablesChhavibhasinNo ratings yet
- Governing System of Turbines (200 MW)Document18 pagesGoverning System of Turbines (200 MW)Debasish Dewan100% (2)
- Financial Analysis of Wipro LTDDocument101 pagesFinancial Analysis of Wipro LTDashwinchaudhary89% (18)
- Navistar O & M ManualDocument56 pagesNavistar O & M ManualMushtaq Hasan95% (20)
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Generate 40kHz PWM Waveform with 50% Duty CycleDocument8 pagesGenerate 40kHz PWM Waveform with 50% Duty CycleDharanNo ratings yet
- Torque-Speed Characteristics of DC MotorsDocument58 pagesTorque-Speed Characteristics of DC Motorsm1u2raliNo ratings yet
- EE208 Measurements and InstrumentationDocument2 pagesEE208 Measurements and InstrumentationSREEHARI S JNo ratings yet
- Class 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsDocument19 pagesClass 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsArchit DasguptaNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- Lecture Time Domain Analysis of Control SystemsDocument15 pagesLecture Time Domain Analysis of Control SystemsFahadKhNo ratings yet
- Chapter Four: DC-DC Conversion: DC ChoppersDocument55 pagesChapter Four: DC-DC Conversion: DC Choppersfor lifeNo ratings yet
- Computer Applications in Power Systems: By: DB&DGDocument106 pagesComputer Applications in Power Systems: By: DB&DGNatinaelNo ratings yet
- Class 27 - Modeling of Servo MotorsDocument25 pagesClass 27 - Modeling of Servo Motorsapi-26676616100% (1)
- Ac Servo Motor LabDocument23 pagesAc Servo Motor LabHardik SharmaNo ratings yet
- Shubham SeminarDocument19 pagesShubham SeminarShubham BodadeNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- Programmable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Document12 pagesProgrammable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Helena Sullivan100% (1)
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 pagesImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- Control System Lab ManualDocument20 pagesControl System Lab ManualvaibhavNo ratings yet
- Single Phase Induction Motor Speed ControlDocument35 pagesSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- Transfer Function of The DC Motor (Yaser Rahmati)Document4 pagesTransfer Function of The DC Motor (Yaser Rahmati)Farag AlargtNo ratings yet
- Unit-4 PPT. Embedded Systems by SuryaDocument34 pagesUnit-4 PPT. Embedded Systems by SuryaAnonymous 3yqNzCxtTz100% (1)
- Question Bank-EE2352 - Solid State DrivesDocument4 pagesQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Mod 1.1Document14 pagesMod 1.1Mr. K.S. Raghul Asst Prof MECHNo ratings yet
- Manufacturing Process Automation Questions and Answers - SanfoundryDocument7 pagesManufacturing Process Automation Questions and Answers - SanfoundryKumar Ravindra100% (1)
- Alpha-Beta TransformationDocument3 pagesAlpha-Beta TransformationM_Rocha0% (1)
- Diff BTWN MOSFET and BJTDocument2 pagesDiff BTWN MOSFET and BJTMadan R HonnalagereNo ratings yet
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- 5th ModuleDocument23 pages5th ModuleJayasmita DasNo ratings yet
- 8MS Three-Phase Synchronous MotorsDocument163 pages8MS Three-Phase Synchronous MotorsrrrNo ratings yet
- SPWMDocument16 pagesSPWMSatyanarayana GurramNo ratings yet
- EI Lecture No.1Document7 pagesEI Lecture No.1Hassen LazharNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- Closed Loop Control For A Brushless DC Motor To RuDocument1 pageClosed Loop Control For A Brushless DC Motor To RuscribsunilNo ratings yet
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- Chapter 7 - Data Transmission and TelemetryDocument16 pagesChapter 7 - Data Transmission and Telemetryjst86No ratings yet
- Unit 5 - Power System Operation and ControlDocument28 pagesUnit 5 - Power System Operation and ControlSilas Stephen100% (2)
- Basic PWM Servo Motor Control using ATmega8 MicrocontrollerDocument6 pagesBasic PWM Servo Motor Control using ATmega8 MicrocontrollerAlan MontalvoNo ratings yet
- UNIT 3-2marks-FET PDFDocument9 pagesUNIT 3-2marks-FET PDFpriyanka236No ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Monochrome TV TransmissionDocument2 pagesMonochrome TV TransmissionSam DyNo ratings yet
- Unit-1 PROTECTIVE RELAYING (Switchgear and Protection)Document76 pagesUnit-1 PROTECTIVE RELAYING (Switchgear and Protection)sujithNo ratings yet
- Industrial Automation & Robotics PTU Question PapersDocument14 pagesIndustrial Automation & Robotics PTU Question PapersYuvraaj SinghNo ratings yet
- Sensors & ActuatorsDocument67 pagesSensors & Actuatorsmahendra naik100% (1)
- Mechatronics - 302050: Lecture Notes / PPT Unit IDocument66 pagesMechatronics - 302050: Lecture Notes / PPT Unit ISwapvaibNo ratings yet
- Measurement of VelocityDocument59 pagesMeasurement of VelocityYogeshBhatt100% (1)
- Exp 11 Single Phase Inverter Part IDocument7 pagesExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- 2019 Full Exam SolutionDocument8 pages2019 Full Exam SolutionAhmed AliNo ratings yet
- Intro2robotics PPT SMRDocument48 pagesIntro2robotics PPT SMRapi-115728880No ratings yet
- Short Notes On Servo MotorDocument2 pagesShort Notes On Servo MotorHimansu Goswami100% (3)
- Measurements and Instrumentation Ec2351 Model Question PaperDocument11 pagesMeasurements and Instrumentation Ec2351 Model Question PaperSathish BalaNo ratings yet
- Synchros and ResolversDocument29 pagesSynchros and ResolversjennybunnyomgNo ratings yet
- Unit-1:: Introduction To Basics of Industrial AutomationDocument23 pagesUnit-1:: Introduction To Basics of Industrial Automationanuj jain100% (1)
- Speed Control of DC Motor Using Sliding Mode Control ApproachDocument5 pagesSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalNo ratings yet
- Single Phase InverterDocument7 pagesSingle Phase InverterBHALAJI BIRLANo ratings yet
- Commutation TechniquesDocument13 pagesCommutation TechniquesSantosh SinghNo ratings yet
- Introduction To Electric DrivesDocument75 pagesIntroduction To Electric DrivesVikas PooniaNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- Chapter Twelve: DC Chopper DrivesDocument24 pagesChapter Twelve: DC Chopper Drivesfor lifeNo ratings yet
- Servomotor PptsDocument26 pagesServomotor Pptsjasdeep_kour236066No ratings yet
- 04 Remote Sensing and IndicationDocument17 pages04 Remote Sensing and IndicationFurkan DuruNo ratings yet
- Servo Motor SystemDocument8 pagesServo Motor SystemAnonymous Y7WZ3dqoXhNo ratings yet
- Level 10 Halfling For DCCDocument1 pageLevel 10 Halfling For DCCQunariNo ratings yet
- SolBridge Application 2012Document14 pagesSolBridge Application 2012Corissa WandmacherNo ratings yet
- Process Financial Transactions and Extract Interim Reports - 025735Document37 pagesProcess Financial Transactions and Extract Interim Reports - 025735l2557206No ratings yet
- PowerPointHub Student Planner B2hqY8Document25 pagesPowerPointHub Student Planner B2hqY8jersey10kNo ratings yet
- Chapter 4 DeterminantsDocument3 pagesChapter 4 Determinantssraj68No ratings yet
- ERIKS Dynamic SealsDocument28 pagesERIKS Dynamic Sealsdd82ddNo ratings yet
- Inventory ControlDocument26 pagesInventory ControlhajarawNo ratings yet
- Rapport DharaviDocument23 pagesRapport DharaviUrbanistes du MondeNo ratings yet
- A Reconfigurable Wing For Biomimetic AircraftDocument12 pagesA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaNo ratings yet
- Uses and Soxhlet Extraction of Apigenin From Parsley Petroselinum CrispumDocument6 pagesUses and Soxhlet Extraction of Apigenin From Parsley Petroselinum CrispumEditor IJTSRDNo ratings yet
- Checklist of Requirements For OIC-EW Licensure ExamDocument2 pagesChecklist of Requirements For OIC-EW Licensure Examjonesalvarezcastro60% (5)
- Use Visual Control So No Problems Are Hidden.: TPS Principle - 7Document8 pagesUse Visual Control So No Problems Are Hidden.: TPS Principle - 7Oscar PinillosNo ratings yet
- Week 15 - Rams vs. VikingsDocument175 pagesWeek 15 - Rams vs. VikingsJMOTTUTNNo ratings yet
- Photosynthesis Lab ReportDocument7 pagesPhotosynthesis Lab ReportTishaNo ratings yet
- Equilibruim of Forces and How Three Forces Meet at A PointDocument32 pagesEquilibruim of Forces and How Three Forces Meet at A PointSherif Yehia Al MaraghyNo ratings yet
- White Box Testing Techniques: Ratna SanyalDocument23 pagesWhite Box Testing Techniques: Ratna SanyalYogesh MundhraNo ratings yet
- WindSonic GPA Manual Issue 20Document31 pagesWindSonic GPA Manual Issue 20stuartNo ratings yet
- Paper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Document12 pagesPaper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Hisham AlEnaiziNo ratings yet
- (123doc) - Chapter-24Document6 pages(123doc) - Chapter-24Pháp NguyễnNo ratings yet
- USDA Guide To CanningDocument7 pagesUSDA Guide To CanningWindage and Elevation0% (1)
- Dance Appreciation and CompositionDocument1 pageDance Appreciation and CompositionFretz Ael100% (1)
- NABARD road inspection report formatDocument24 pagesNABARD road inspection report formatSrinivas PNo ratings yet
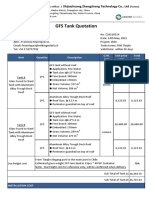
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- Mil STD 2154Document44 pagesMil STD 2154Muh SubhanNo ratings yet
- Form 709 United States Gift Tax ReturnDocument5 pagesForm 709 United States Gift Tax ReturnBogdan PraščevićNo ratings yet